
また3か月近くのブランクが空きましたが、気を取り直してメカ積みと配線の取り回しを完成させます。
前回、ライトchを設けるためにプロポのジェスチャーを変更していて、現在は
ch1: ステアリングサーボ
ch2: ESC(メイン)
ch3: (空き)
ch4: (空き)
ch5: ライト
ch6: ESC(前後進切替) / 変速サーボ
となっています。やはりライトはスイッチでON/OFFしたいので、変速サーボをch6に追い出して空いたch5をライトに割り当てました。ついでに、使わなさそうなドラッグブレーキ調節のchを廃止しました。
さて、前後進切替と変速サーボを同居させたことによりちょっと煩わしいことが起きます。同居させてどう操作するかというと、ch6入力を3ポジションのスイッチに割り当てて
上: リバース
中: 1速
下: 2速
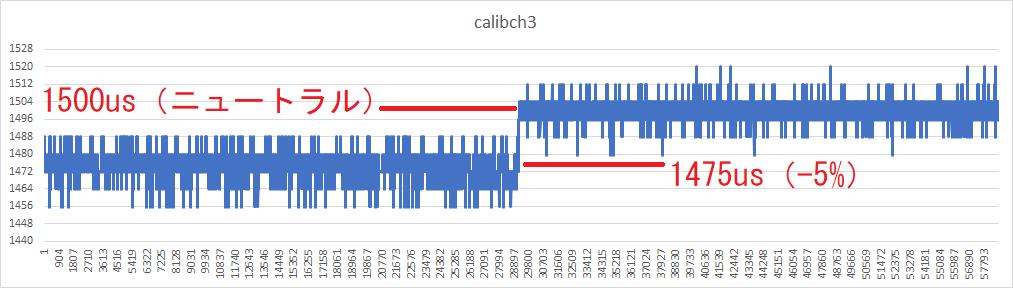
として使います。このとき、トランスミッションの構造上、変速サーボの可動域は「中」~「下」の範囲に制約されるので、「上」にするのはその制約に逆らうことになります。サーボセイバーがあるので「上」の値を最大(-100%)にしても壊れはしませんが、サーボに無駄な負荷をかけたくはありません。ESCやLEDコントローラーが認識できるギリギリの、できるだけ0%に近い値で済ませたいところです。そのため前回は-8%に設定していたのですが、これでもサーボが少し唸ってしまうのが気になっていました。-5%くらいにしたいのですが、それには私のLEDコントローラーがもっと精度よくパルス信号を認識しなければいけません。前回の実装ではノイズ除去に「直近11サンプルの中央値」を使っていたのですが、精度をさらに高めるには別の方法を使う必要がありそうです。
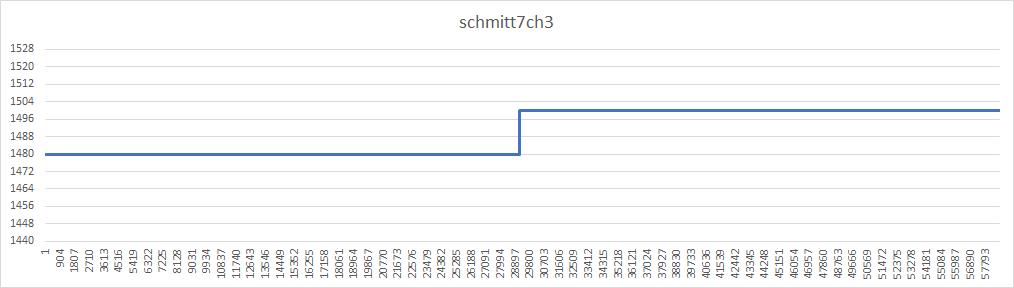
そこで見つけたのがシュミットトリガと呼ばれる仕掛けです。私が理解した限りでは、「現在値に応じて、閾値が変化する」というもののようです。本来はそのような挙動をする電子回路に対する呼称のようですが、ソフトウェアで同様の仕掛けを実装することもできますね。中央値などの統計処理よりも精度のよいノイズ除去が期待できそうです。対象がデジタル信号に限られるのが一応のデメリットですが、今回は「上」とそれ以外の2値信号ですから問題ありません。試しにExcel上で実装してシミュレーションしてみたところ、画像の通り完璧に認識することができました。

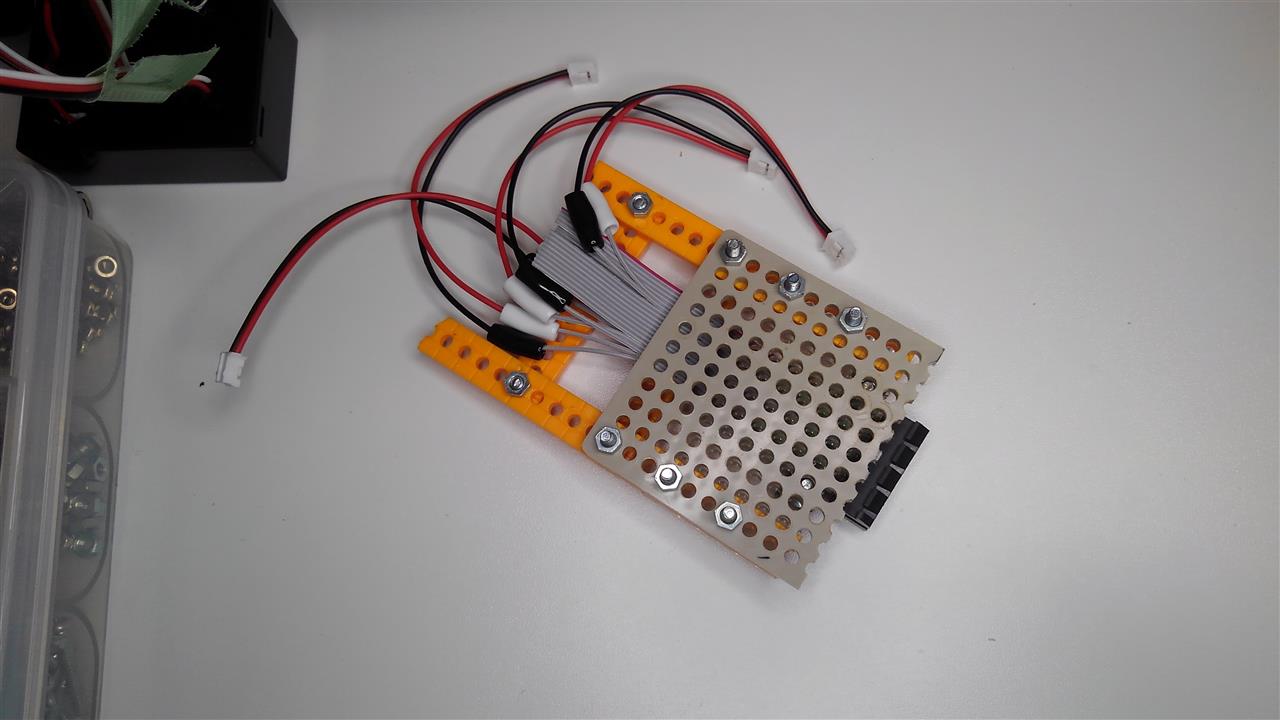
さっそくこれを実機にも実装します。前回からそうなのですが、サイズの都合で不採用となったArduino Nano Everyを、ATmega328Pにプログラムを書き込むためのライターとして使っています。実機から外したATmega328Pに、シュミットトリガを実装した新しいプログラムを書き込んで、

ちゃんと後退灯が点灯/消灯できることを確認しました。ちなみに、この基板にはシリアル通信用の端子を実装していないので、値を確認したいときは画像のようにGNDとTXをワニグチクリップ付きのリード線で引っ張り出す必要があります。

さてこれで本当にR/Cメカが揃ったのですが、LEDユニットとLEDコントローラーの置き場がまた悩ましいです。スペースは十分あるはずなのですが、場所によって不安定だったり配線の取り回しが悪かったりしてなかなか決まりません。
とりあえず、切り出したユニバーサルプレートをこの部分に一枚追加することで平らな場所を確保しました。
次に、適当なサイズで1mmのプラバンを切り出して、

LEDユニットとLEDコントローラーを合体させました。

ちなみに、LEDコントローラーからLEDユニットへの配線が取り回しやすいよう、このような向きで合体させています。

ユニバーサルプレートにスポンジテープを貼りまして、

ビニール袋による申し訳程度の防水加工を施したLEDユニット・LEDコントローラーを搭載します。ちなみにこのビニール袋はLEDユニットが入っていた袋です。
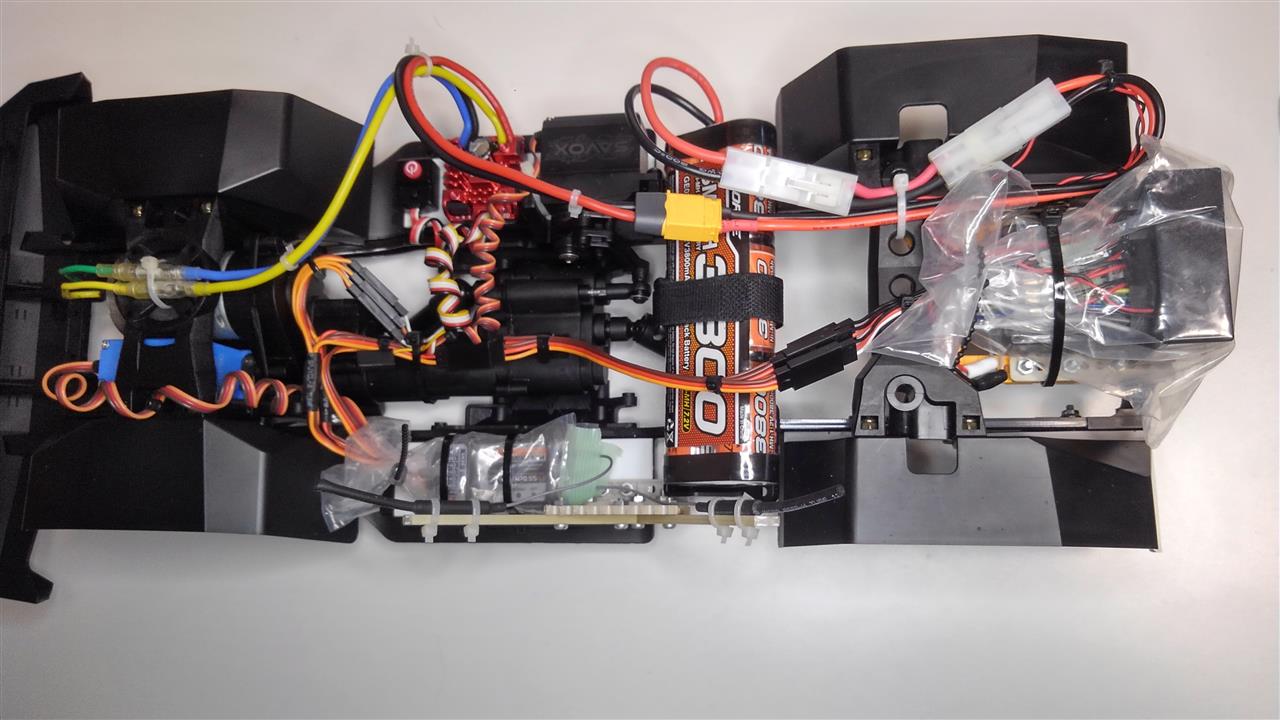
メカの配置が全て決まったので、結束バンドやコードクリップで配線を整えました。あまり美しくはできませんでしたが、
・シャーシ下にはみ出さない
・可動部に触れない
・モーター電源線、信号線、アンテナ線をそれぞれ近接させない
という最低限の配慮はしてあります。これでメカ積み完了です。

併せて、ボディ裏のLED配線もアルミテープで整えました。もともとコードクリップで取り回してありますが、クリップとクリップの中間が遊んでいるとどこかに引っ掛けるかもしれないのでその対策です。なぜアルミテープを使うのかはよくわかっていませんが、このように処理されたボディをよく見かけるので見よう見まねでやってみました。ガムテープとかよりもコードへの追従性が良いような気がします。ただ、端子の根本などに触れると短絡する恐れがあるのでそこは注意ですね。
この3月で製作開始から1年が経過しました。こんなに時間をかけてラジコンを組み立てるのは初めてです。「組み立て途中はできるだけ箱にしまう」というマイルールで進めてきたので、最後にボディ小物とアクスルの取り付けが残っています。アクスルを取り付けていないせいで、恐ろしいことにここまで一度も走行テストができていません。ボディやらLEDやらに散々時間をかけて組み立ててきたのに、ラジコンカーとして最も重要な機能である走行がうまくいかなかったらどうしましょうね。次回、無事に最終回を迎えられることを祈ります。
ブログ一覧 |
スケールクローラー | 日記
Posted at
2024/04/14 23:52:50
 また3か月近くのブランクが空きましたが、気を取り直してメカ積みと配線の取り回しを完成させます。
また3か月近くのブランクが空きましたが、気を取り直してメカ積みと配線の取り回しを完成させます。



















