")
前回
ここで、この
アプリに「タコメータ」を追加したく回路を作成しました。
何回か実走してみて特には問題はなかったのですが、高回転(10000rpm)付近で信号パルスが乱れる時がありました。本当に極たまになので使用には問題はないのですが、せっかくなんでもうちょっと回路を作って遊んでみますw
前回回路はピックアップからくる信号を「ローパスフィルター」回路を通して「単安定マルチバイブレーター」でパルス信号を作ってやりました。
基本的には同じやり方でもうちょっと確実に信号が拾えるように工夫してみます。
楽しかったので備忘録…w
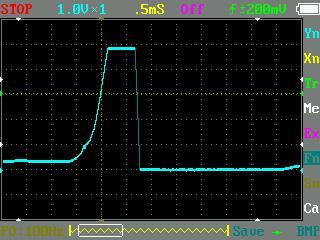
まずはピックアップからくる生信号をもう一度測定しておさらい…。
オシロは前回と同様おもちゃオシロ「DSO NANO V3」を使用しています。

正側に+6Vくらい、そして負側に−22Vくらいに大きく振っているのがわかります。
波形前半にはかなりのノイズが乗っかっています。
次に時間を延ばして測定しました。
正側は+5V程度に安定していますが、負側は-10〜-20Vと大きくばらついています。
今回は以下のような順序で回路を考えていきます。
①波形前半のノイズをしっかりとる。
②扱いにくい負側の波形を除去する。
③ノイズ取りで小さくなった波形を増幅する。
④しきい値を高くして、低電圧でのノイズをスルーする。
⑤パルス波形を整える。
んで…。今回考えてみた回路はこれです。

んで…。それを実際に基板を作ってみました。

今回の回路は4部構成になっています。
とりあえずアイドリング時の波形を確認してみます。
まずは前回と同様に最初に「
ローパスフィルター」を入れてやります。
今回の回路は抵抗値Rをかなり大きめにしたのでここを通る信号はかなり小さくなると思います。抵抗値Rを半固定抵抗で調整するようにしてフィルターの強さを調整できるようにしました。
これが上の順序①。
「
ローパスフィルター」の最後に「
ダイオードクランプ」をGNDに接続しているので負側の波形は無くなるはず…。
これが上の順序②。
アイドリング時に抵抗値R=100kΩの回路を通った波形は以下です。

正側に+2.2V程度となっておりかなり小さくなっています。
負側はクランプによってほとんどなくなっています。
次はこの小さくなった波形を増幅してやります。今回は2本の抵抗とオペアンプを使った「
非反転増幅回路」で増幅しました。この回路の抵抗値1kΩと2kΩだと3倍の増幅となります。オペアンプは微小の信号を増幅するのには扱いやすい単電源でフルスイングするオペアンプを使用しました。2回路入りのオペアンプです。
これが上の順序③。
この回路を通った波形はこんなんです。
正側2.2Vの3倍で+6.6V。電源を0V-5Vとしているんで+5Vまでフルスイングしています(実際には5Vまでは微妙にいかないはず…)。
ここまでで信号がはっきりしてきました。おそらくこの状態でもマイコンなどに突っ込んで処理できると思います。
でも、今回はさらに踏み込んで「しきい値(=ON-OFFが反応する境)」を高めに決めてやってGNDあたりで発生するノイズをスルーしてやります。前段階で使用したオペアンプのもう1回路分を使って「
比較回路」という回路を組んでやります。この回路だと3.4Vをしきい値として3.4Vを越えると「ON」、3.4Vを下回ると「OFF」が出力されます。
これが上の順序④。
この回路を通ると…。

この回路を通ると波形は反転します。
大分パルス信号っぽくなってきました。
そして最後の仕上げに前回でも組んだ「
単安定マルチバイブレーター」を組んでやります。前回同様に時定数は1.1msecで設定しました。
これが上の順序⑤。
この回路も波形は反転するので、前段階で反転した波形は元に戻ります。
この回路が最終波形を生成します。

思惑通り1.1msecの幅を持ったパルス信号が無事出来上がりました。
時間を延ばして測定してみます。

波長が25msecなんで2400rpmですな。
と…。ここまでは前回の回路でも同じ波形を生成することができています。
今回の回路では組んだ後でも波形を測定できるようにちょっと工夫をしています。

図の赤丸の所とGND間を測定すると走りながらでも要所を測定できるようにしています。
持っているオシロが小さいので走りながら波形測定っていうのも可能w
測定したい波形は…、エンジン回転を上げた時に…。
①「ローパスフィルター」後にどんな波形になっているか?
②その波形が「非反転増幅回路」後にどのように増幅されているか?
③後は「単安定マルチバイブレーター」後の最終波形が正常に回転数を刻んでいるか?
が知りたいかな…。
ちっちゃいオシロを車載して走ってきましたw

測定は大体8,000rpm〜9,000rpmくらいの時かな…?
このオシロは1chしかないので同時に複数の波形を計ることができません。
まずは、「
ローパスフィルター」後の波形。
入力の抵抗値は100kΩの時です。

振幅が2.0V以下となりかなり小さくなっているのがわかります。
もうちょっとフィルターの抵抗値を小さくして感度を上げた方がいいかも…。
前回の試作回路はこの後で直接「
単安定マルチバイブレーター」に入力していたのでGND付近の波を拾った可能性が高い。
次に、「
非反転増幅回路」後のh波形。

アイドリング時に比べ波の幅がかなり細くなっています。
ソースの電圧が低くなったので5Vギリギリでスイングしています。
このくらいあれば3.4Vのしきい値で十分反応するでしょう。
最後に、「
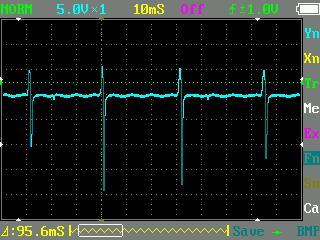
単安定マルチバイブレーター」後の波形を測定してみました。

回転を変化させても波の幅は時定数の通り1.1msec付近で安定したパルスを出力してくれています。
ちょっと、時間を延ばして測定をしてみました。

山の数を数えて秒数を計算すると大まかに4山で30msecだから…。
0.0075sec/山となる。ということは…。
60sec / 0.0075sec = 8,000rpmとなる。
とても良い数値ですね♪
タコメータのためのパルス発生器は完成したっぽい…♪
後は、これをマイコンでカウントしてやってBluetoothでiPhoneに飛ばしちゃいます。
iPhoneアプリはまだ開発中でもう少しで出来上がる。
今考えている画面はこんな感じ…。

さて、まともに動くか…?
ブログ一覧 |
バイク | 趣味
Posted at
2015/04/26 09:23:52
") 前回ここで、このアプリに「タコメータ」を追加したく回路を作成しました。
前回ここで、このアプリに「タコメータ」を追加したく回路を作成しました。
























