
加速に要する電力量(力行電力量)、ブレーキ時の回生電力量、それらの和である消費電力量が、走行パターンによってどのように変化するのか、試験走行を実施しました。
郊外の丘陵地を走行した際のデータはすでにあったので、今回、追加データとして、平坦地を定速走行した場合と、平坦地を通常どおり流れに沿って走行した場合のデータを取得しました。
そこそこ距離のある定速運転可能な平坦なルートをどう選定するか考えましたが、阪神間の沿岸部を通る阪神高速と、その高架下に沿っているR2,43号線を選定しました。沿岸部でもあり、標高は5m前後でほぼ平坦と見なせると思います。
区間は尼崎西出入り口⇔若宮出入り口間の28.7kmを選定し、行きは阪神高速をACCを60km/h設定として定速運転を行いデータ採取、戻りは阪神高速の高架下R2,43号を流れに沿って運転し、都市部通常走行のデータ採取を実施しました。
その他条件としては、空調は送風のみ、時間帯は早朝、天候は雨、タイヤ空気圧は規定値+5%、乗車人員1名です。
ルートプロファイルは以下です。

データは以下にまとめました。
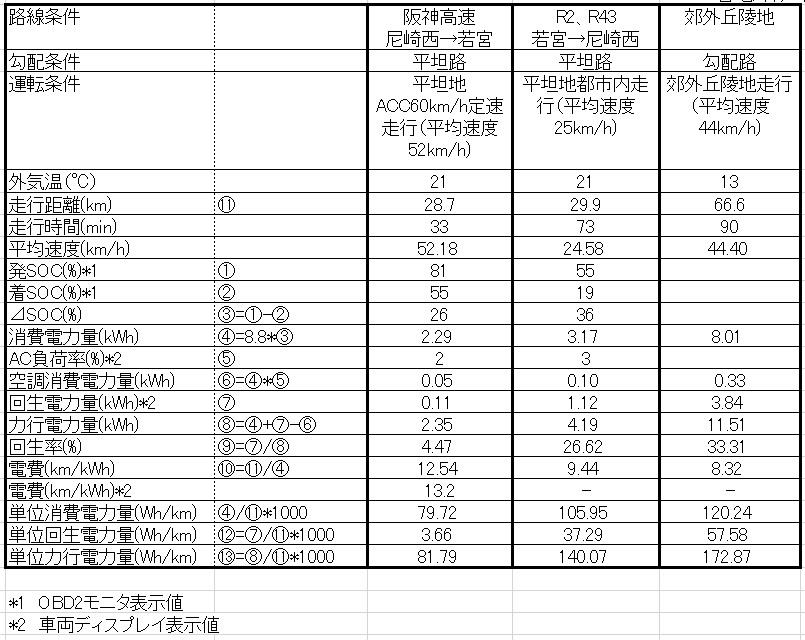
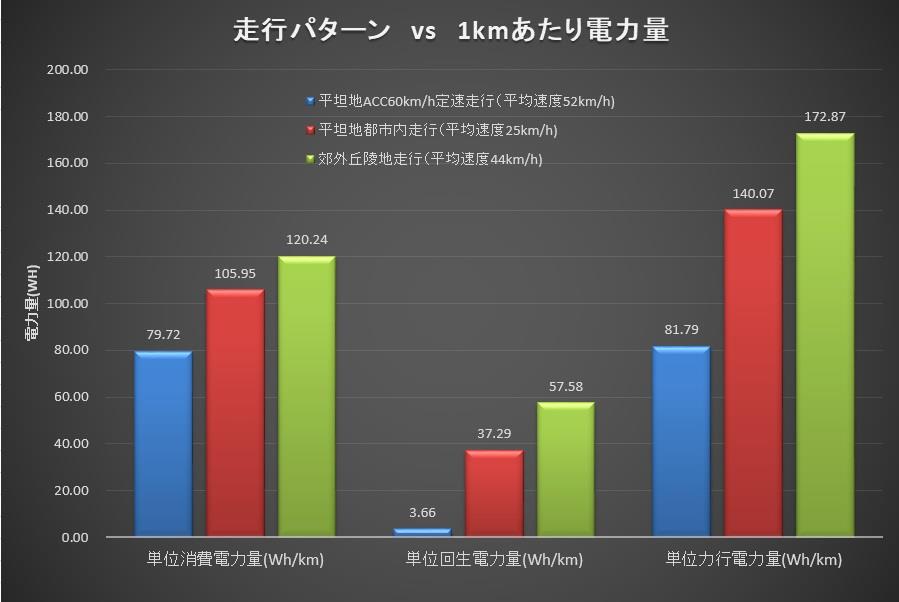
上記のデータから、走行パターン毎の消費電力量と、その内訳である力行電力量、回生電力量をグラフ化しました。距離あたりの数値としています。
最も消費電力量が小さいのは、想定通り、平坦路を60km/h定速運転した条件でした。ほぼブレーキは使用していないので、回生電力量は微少、走行抵抗とバランスして一定速で走行するために必要な力行電力のみで構成されています。回生率(力行電力量に対して、回生された電力量の割合)は5%ほどでした。
その次は都市部平坦路を流れに沿って走行した条件です。平均速度は24km/hと低いです。ゴーストップを繰り返すので、そこそこ回生電力が発生しています。回生率は27%でした。
最も消費電力量が多いのは、アップダウンの多い丘陵地走行時で、加減速度合いと頻度が多いため、力行電力量、回生電力量とも多い結果です。回生率は33%でした。
最後に、電費(km/kWh)です。
OBDモニタのSOC値の変化量に基づき算出しています。
(車両のディスプレイ表示値は5%ほど良い目に表示されているようです)

平坦路60km/h定速運転では12.54km/kWhであり、この条件での満充電EV航続距離は、77km(=8.8kWh×0.7×12.54)と推測されます。
平坦路都市部通常走行では、9.44km/kWhであり、この条件での満充電EV航続距離は58km(=8.8kWh×0.7×9.44)と推測されます。
丘陵地走行では、8.32km/kWhであり、この条件での満充電EV航続距離は、51km(=8.8kWh×0.7×8.32)と推測されます。
走行パターンによって各数値はかなり変動することがわかりました。
回生ブレーキにより運動エネルギーはかなり効率よく回収が可能ですが、それでもなるべく定速運転に近くなるように、無駄な加速やブレーキを避けることが好ましいようですね。
ブログ一覧 | クルマ
Posted at
2019/06/07 18:49:35
 加速に要する電力量(力行電力量)、ブレーキ時の回生電力量、それらの和である消費電力量が、走行パターンによってどのように変化するのか、試験走行を実施しました。
加速に要する電力量(力行電力量)、ブレーキ時の回生電力量、それらの和である消費電力量が、走行パターンによってどのように変化するのか、試験走行を実施しました。








