前回の続きを書こうとしたところ、いろいろ計算しなくてはならないことが多く大変遅くなりました。
それでは続きです。
僕のブログには、走行分析の中に、荷重移動や車輌姿勢という言葉がほとんど出てきません。
なぜ出てこないかと言うと、どちらも今持っているロガーでは測定できないからです。
測定できないものを論じたところで、確認の方法がありません。
その代わり、測定できる項目である横Gと前後G(Gサークル)を確認することにしています。
荷重移動ができていようがいまいが、横Gと前後Gが十分高ければそれでいいのです。
もし、横Gも前後Gも相場よりも低い場合は、その原因として荷重移動を考えます。
しかしながら、荷重移動は横Gと前後Gによって発生する事象なので、横Gと前後Gだけを見ていればおおよそわかります。
したがって、荷重移動なんていちいち考えなくても、横Gと前後Gだけ見てればおおよそのことはわかるので、あまり出てこないというわけです。
ということで、今回も荷重移動は無視して、走行ラインと速度のみで、ドライビングスタイルを考えることにします。
その前に、ドライビングスタイルを語る上では、目標とする最適な走り方を明確にする必要があるため、まずは最適な走り方を考えることにします。
最適な走り方とは最適な走行ラインをタイヤの摩擦円の縁を使って走った結果得られる速度で走ることなので、実質的には最適な走り方=最適な走行ラインとも言えます。
走行ラインで大事なことは、最小旋回半径の大きさと位置です。
これさえ決まれば、あとは必然的に走行ラインが決まります。
最適な最小旋回半径の大きさですが、おそらくこれは数値解析的に求める以外に解を得ることができないので、数値解析=サーキットシミュレーションで求めます。
しかし、闇雲にサーキットシミュレーションをしようとしてもうまくいかないので、まずは作図法と僕の経験から得た
最小旋回半径の算出式で半径を求めます。
次に、この半径を用いて最小旋回半径の大きさと位置を調整して最適な走行ラインを求めます。
具体例がないとわかりずらいので、TC1000の1~2コーナで計算した例をごらんください。
まずは、いつものように作図法で最小旋回半径と走行ラインを求めます。

TC1000の1~2コーナの推奨値は47.3mだったので、42m、47m、52m、57mの4種類の最小旋回半径を使った走行ラインでシミュレーションをしました。
2コーナ以降の走行ラインは全て同じとして、ラップタイムで比較します。
走行ライン

実際に走れそうな走行ラインにしようとすると、57mだけ他の3つと大きく違うラインになってしまいました。
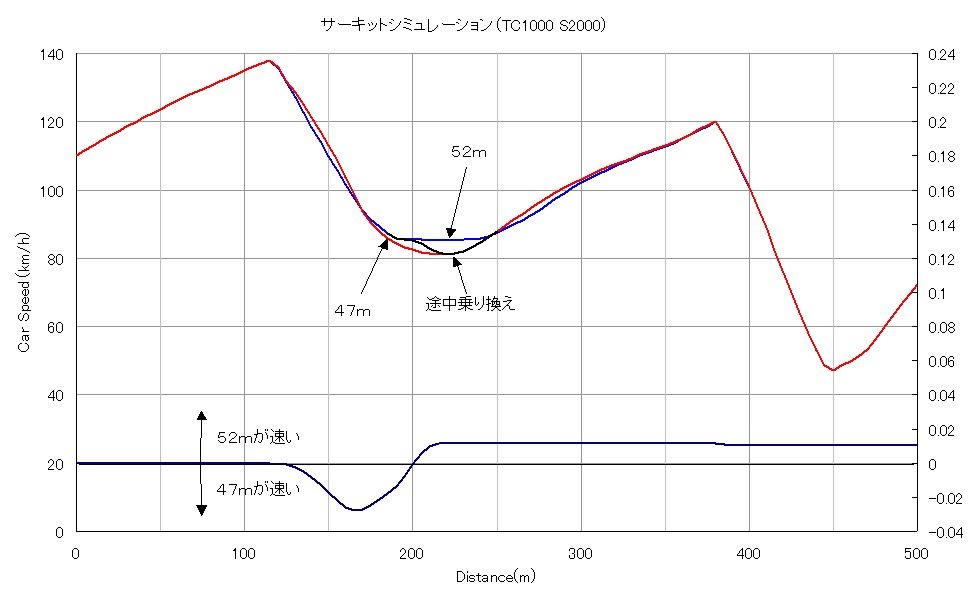
速度です。 黒:42m、赤:47m、青:52m、緑:57m

42~52mまでは減速部も加速部もあまり違いがないのですが、57mだけは走行ライン同様に大きく違う結果となりました。
ラップタイムの計算結果
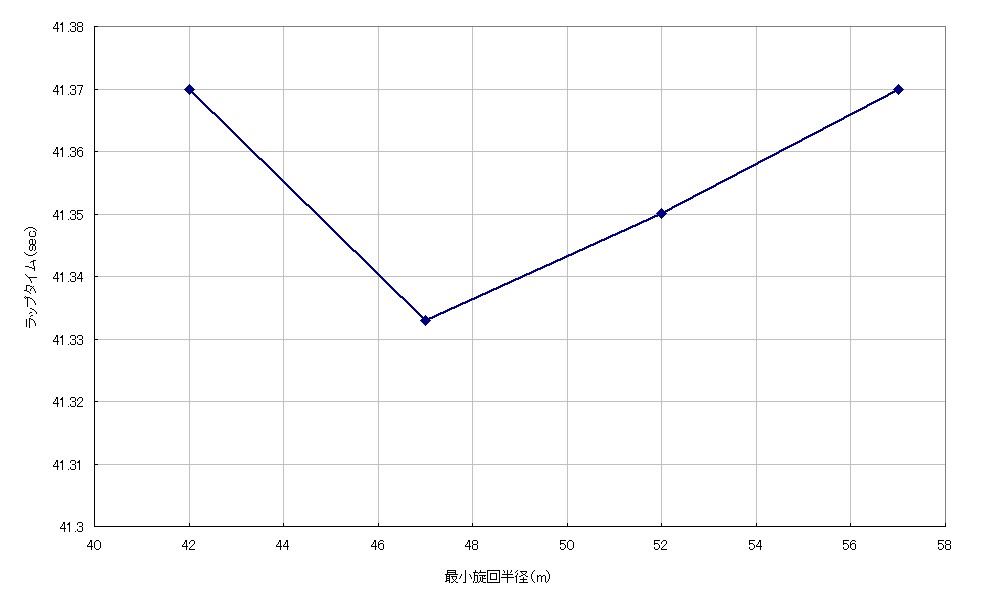
推奨値なだけに予定どおり47mのときが最も良い結果になりました。
57mは速度も走行ラインも大きく異なりますが、0.1秒以内の差で42mと同じラップタイムになりました。
ところで、TC1000の場合は2コーナから3コーナまでの直線距離が短いので3コーナ手前での最高速度がラップタイム与える影響は小さいのですが、直線距離が長いコースでは最高速が大事になります。
そこで、最高速を比較すると

最高速でも47mが最も良い結果となりました。
このシミュレーション結果で何が言いたいかと言うと、最適な最小旋回半径に対する差が大きければ大きいほどラップタイムが低下するということです。
しかし、47mと52mの差は0.017秒しかないので、ほとんど同じとも言えます。
もちろん、これがコーナ10個分になると、0.17秒も差がついてしまうので無視できないとも言えます。
僕レベルであれば、そもそもの運転の精度が低いので、誤差みたいなものだと思いますが、スーパーフォーミュラクラスになれば、この差は許されないはずです。
なので、レーシングチームでは、このようなシミュレーションを行った上で、最適な走り方ができるようにクルマのベースセッティングを決めていると思われます。
ここで話をドライビングスタイルに戻します。
前回も書いたように、いきなり最適な走り方ができるとは思えません。
従って、最適な走り方から少し余裕を持った走り方をして、修正していきたいわけです。
もし、42mの走行ラインを最適だと考えて、その通りに走ったとします。
完璧に走れたとして、最適よりも0.04秒遅い結果しか得られません。
また、途中で減速を開始してから最適でないことに気が付いても、減速開始地点が奥なので、もはや修正することができません。
ところが、52mの走行ラインを最適と考えて、その通りに走ったとします。
完璧に走れば0.017秒遅いだけなので、遅れは最小限に済みます。
さらに!、ここが重要です。
52mの走行ラインでは減速の途中で最適でないと気が付いてしまった場合、より半径が小さい側の走行ラインであれば走行ラインを変更することが可能なのです。
こんなイメージです。
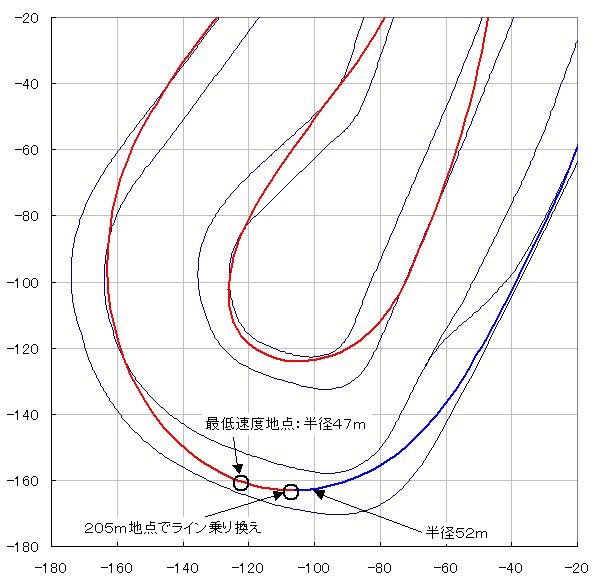
上図のように205m付近から走行ラインの目標を途中で変更し、走行ラインに合わせて速度も落とします。
このようにラインを乗り換えたときのラップタイムは42.32秒となり、なんと47mのみで計算したときよりも速くなってしまいました。
実際はシミュレーションのような速度変化をするのは難しいと考えられるので、ほぼ同じタイムになると考えられます。
今までのところをまとめると、
1、最適な最小旋回半径からの差が大きくなるほどラップタイムは遅くなる。
2、最適な最小旋回半径よりも小さい半径を当初目標とすると、減速の途中で修正できない。
3、最適な最小旋回半径よりも大きい半径を当初目標とすると、ラップタイムの落ち幅が小さく、減速途中でも最適な走行ラインに修正できる。
つまるところ、荷重移動がGサークルへ影響を与えないとすれば、コーナリング速度が高い側から最適な走り方に修正した方が、ラップタイムの落ち幅が小さく、かつ修正の自由度も高いってことです。
なのでこの辺が、いわゆる欧州式をススメる人がいる理由なのではないかと思われます。
さらに続きます。












