今日は第4回目です。
今回は基本からやり直すことにしました。
今までの走行ラインは実測結果の速度変化や走行ラインになんとなく合うように決めて、それをなんとなく修正していたのですが、今回の検討では”なんとなく決めたライン”では具合が悪いことに気が付きました。
それと今までの走行ラインですが、1mずつ手打ちすると時間がかかるのと、速度変化がキレイでないので走行距離の2乗で半径が変化する式で計算した走行ラインを使っていて、この”2乗”に実測結果の速度変化や走行ラインになんとなく合う以外の根拠がなかったのでこれも見直すことにしました。
さらに、実際のコースの形状に合わせて走行ラインを決めると、いろいろわかりにくくなってきたので、今回は基本に戻って単純なヘアピンコーナを作って、計算することにしました。
まずは、コースと走行ラインです。
走行ラインは曲がり始めから半径が最小になるまでの走行距離(コーナ距離)違いで、80m~140mまでの5種類を作りました。

これらの走行ラインの半径変化
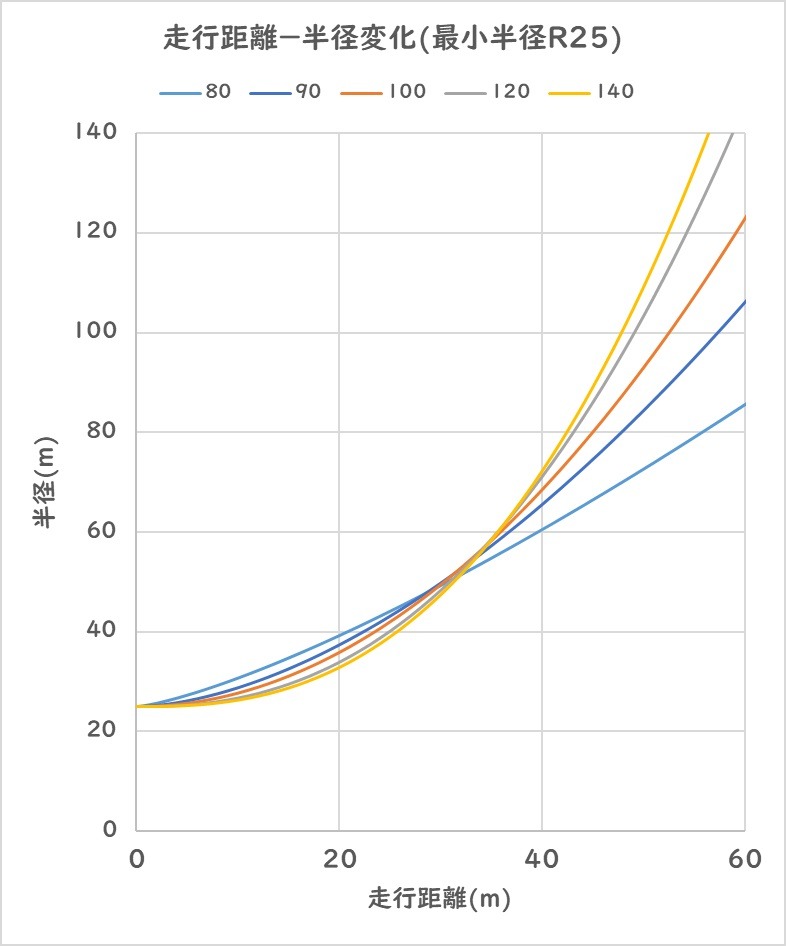
半径は下式で計算しています。
最小半径からXの距離の曲率半径:R=a・X^n+R0 (R0は最小半径で今回は25)
ここでaとnは係数で、コーナ中央までに向きが90°変化し、横方向に40m移動するように計算して決めました。
走行ラインの半径変化のグラフを見てわかるように、コーナ距離が長い方が最小半径に近い走行距離が長いことがわかります。
実際には今回作ったR=a・X^n+R0の計算式で計算される走行ライン以外にも無限大に走行ラインの種類が考えられるのですが、ある程度の傾向を知ることが目的なので、今回はこの走行ラインで傾向を確認しました。
次にこれらの走行ラインをCIVIC TYPE-Rで走らせたときのシミュレーション結果を見てみます。
ラップタイム

減速区間(スタートラインからコーナ中央まで)

加速区間(コーナ中央からゴールまで)

ラップタイムではコーナ距離が100mの走行ラインが最も速いのですが、これを減速側と加速側で分けると、それぞれ異なっているこがわかります。
最も速いコーナ距離は
・減速側:140m
・加速側: 90m
これを走行距離に対する速度変化と時間差で見てみます。

減速側ではコーナ距離140mの速いのですが、ほとんどがブレーキ開始から半径90mの間までで時間差がついていることがわかります。
これは、コーナ距離140mの方が半径が大きい距離が長く、その区間は速度が高いことが理由です。
加速側はコーナ距離100mの方が速く、ほぼ最低速度付近だけで時間差がついています。
これは、コーナ距離100mの方が最小半径距離が短く早く加速ができることが理由です。
この結果から、このヘアピンコーナをCVIC TYPE-Rで走らせた場合は減速側と加速側で最適な走行ラインが異なるということがわかりました。
今までの富士やハンガロリンクの計算で想定と逆の結果になってしまった理由は、コーナの最低速度位置とか、コーナ中央に対して半径変化が対称だとかそういうことが理由ではなくて、減速側、加速側の最適な走行ラインからのズレが大きくなったためと推測されます。
そこで、今回計算した中で最も速い組み合わせ(コーナ中央が最低速度で減速側140m、加速側90m)と、この組み合わせに半径変化を近づけつつコーナ位置を奥側に6m移動した走行ラインを作り比較をしてみました。
最も速い組み合わせのコーナ中央位置は637mで、最小半径を奥側に6m移動した走行ラインの最低速度位置は643mです。
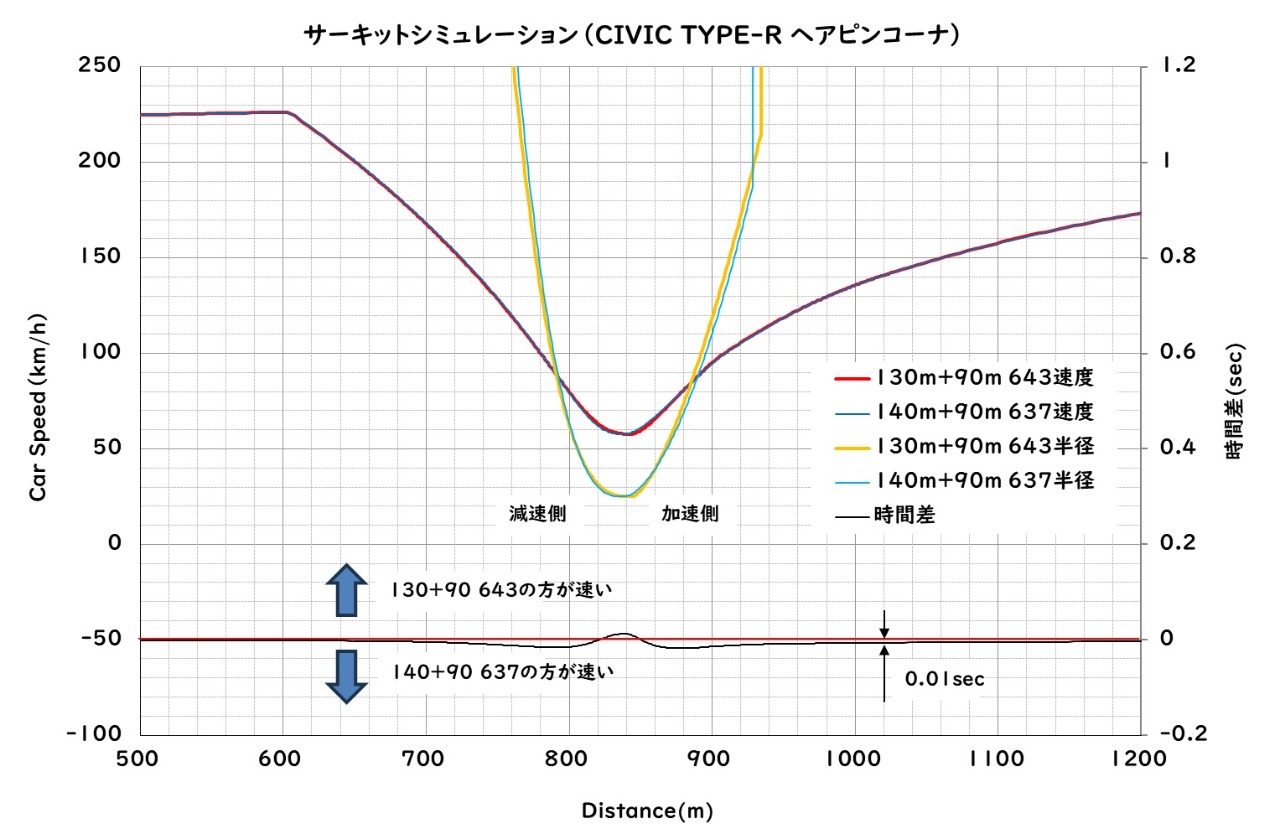
最低速度位置が中央のときと比較して奥側は0.01秒遅くなりましたが、ほぼ同等にすることができました。
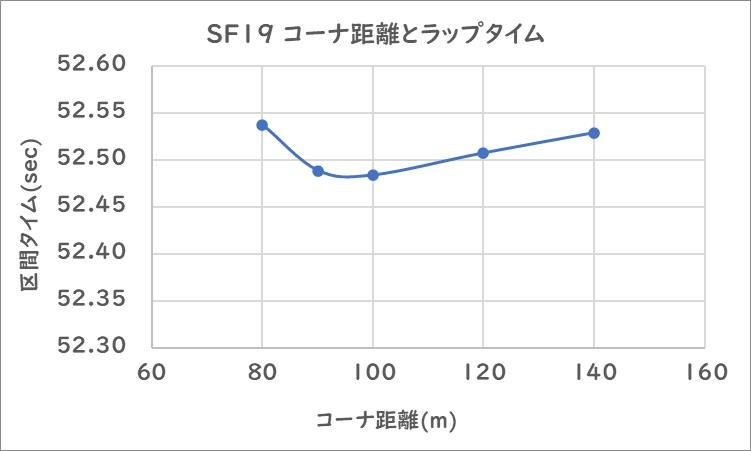
次はSF19の計算結果です。
ラップタイム
減速区間(スタートラインからコーナ中央まで)

加速区間(コーナ中央からゴールまで)
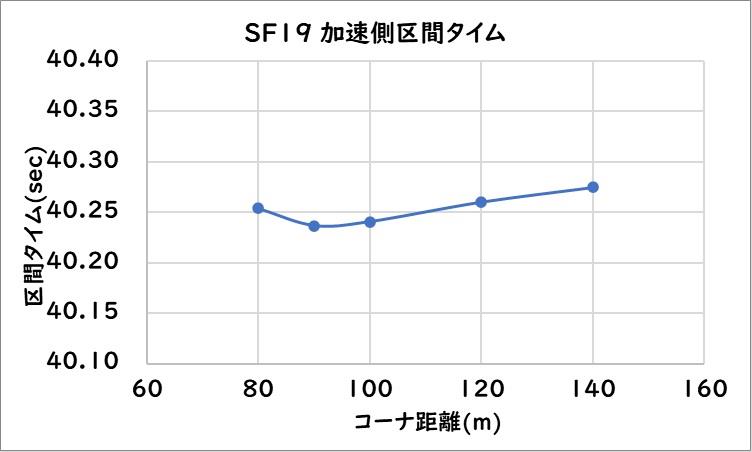
CIVIC TYPE-Rとは異なり減速側はコーナ距離が100mのときが最も速くなりました。
この原因は恐らく、SF19はダウンフォースが計算に入っているので、速度が低くなるとその分摩擦円が小さくなり最低速度付近で走行する距離が長くなると、摩擦円が小さい状態で走行する距離が長くなるためと思われます。
SF19でも最低速度位置を643mにした走行ラインで計算したところ、CVIC同様に最速の組み合わせよりも0.01秒の遅れとなりました。
また最低速度位置を手前にした計算もしましたが、奥側にしたときと同様にコーナ中央の最速組み合わせに半径変化を近づけたときが最も速い結果となりました。
これまでの計算結果からおおよそわかったことまとめると
1、クルマの性能(摩擦円の大きさやエンジン加速能力)に対し最速となる走行ラインは異り、減速側と加速側も最速となる走行ラインが異なる。
2、コーナ中央を最低速度としたときの最速走行ラインに近い半径変化をする走行ラインであれば、最低速度位置が前後に5m程度ズレても区間タイムもほぼ同じになる。
ということで、基本的な傾向がわかってきたので、次回から改めて富士スピードウェイとハンガロリンクで今回作ったR=a・X^n+R0の走行ラインでシミュレーションをしてみたいと思います。
Posted at 2024/03/17 21:12:59 | |
トラックバック(0) |
サーキット走行理論 | 日記































