昨日はのんびり有休でした。
僕のブログを読まれている方はお気づきかもしれませんが、僕は欧州式なる走らせ方が大嫌いです。
なのでしつこく取り上げます。
ここで言う欧州式の定義は、
①直線で減速を終わらせる
②旋回中は横方向のみにタイヤのグリップを使う
という走らせ方です。
そもそも、欧州にも欧州式で走らせる人はいないので、特殊浴場のことをト○コ風呂と呼ぶのと同じように失礼な話です。
でも、わかりやすいので、欧州式という呼び方はそのまま使います。
ところで、初心者は多くの場合欧州式に近い走らせ方をすることが多いです。
かく言う僕も、欧州式寄りの走らせ方をしていました。
その理由は
1、目に見えてわかりやすい減速目標地点は直線の終わり(=曲がりはじめ)のところであること。
2、アウト・イン・アウトの目的は旋回半径をなるべく大きくして、旋回中の速度を高くすることとされていたこと。
3、”ブレーキを残す”ことの目的は、曲がらないクルマを曲げることとされていたこと。
つまり、クルマがきちんと曲がってさえくれれば、ブレーキを残す必要はなく、旋回速度を高くすることができて、かつ走らせやすい走らせ方=直線で減速を終わらせることが速い走らせ方なのである。と思っていました。
ブレーキを残す=速度が低下するなので、クルマが曲がれば速度を低下させないようにブレーキは残したくないのが当然の考え方だと思うわけです。
しかし、こんな走らせ方では、仮にクルマがカキ~ンと曲がったとしても、全く速く走らせることはできないし、実際にはカキ~ンと曲がらないので、ますます速く走れないということに気が付きました。
細かい話は「
アウト・イン・アウト」を読んでいただくとして、とにかく欧州式では速く走れないのです。
ところが、初心者は多くの場合、欧州式に近い走らせ方をするので、ロガーデータ解析の手伝いをするときは、それをドライバーにわかってもらうことに多くの時間を費やします。
データを見たり、車載映像を見たりしながら、何度も何度も同じことを表現を変えながら理解してもらうために頭を使って説明しています。
説明する相手が変われば、また一からやり直しなので、これを何度も繰り返します。
にも関わらず
オートスポーツやREV SPEEDで、「欧州式が速い」とか、「ブレーキを残さないコーナリングが速い」とか書かれると、すごくムカつくのです。
ということで、今日はもてぎの1,2コーナの事例を見てみましょう。
先週の日曜日、もてぎのJOY耐の練習に行くということで、いつもようにロガーデータ解析要員としてお手伝いに行ってきました。
もてぎの1コーナはTC1000の1コーナとそっくりで、見た目のRが小さいので、1コーナ手前目掛けて減速したくなります。(僕は走ったことありませんが・・・)
そのため、コーナの走り方をきちんとイメージできていない人達は、必然的に欧州式みたいな走り方になりがちです。
そして、今回は2人の若手がドライバーのため、想定してたとおりのデータをとることができました。
ではごらんください。
赤:I君A、青:I君B、灰:N君B(比較用)

走行ライン

赤と青のダブルI君が今回のドライバーなのですが、二人ともだいたい440~450m付近を目掛けて減速していることがわかります。
その結果、旋回半径を大きくとることができ、日本式で走るN君B(灰)よりも高い旋回速度を保つことができています。
このグラフだけでは、どちらの区間タイムが速いのかわからないので、II君AとN君Bを区間タイムを比較したグラフもごらんください。
黒線がタイム差を表していて、上に行くほどI君Aが遅れています。

2コーナ立ち上がりの650m付近で比較すると、0.3秒も差があります。
実際は、N君Bのラインの方が走行距離が3mほど長いので、それを考慮すると0.2秒の差があります。
コーナ速度は速いが、区間タイムは遅いです。
本当はさらに2~3コーナの直線部分の差が加算されるので、もっと差が広がります。
ここで、それぞれの最小旋回半径、最大横G、最低速度を比較してみましょう。
最低速度 最大横G 最小旋回半径
I君A : 93km/h 1.20G 57m
I君B : 88km/h 1.15G 53m
N君B: 85km/h 1.29G 44m
最大横Gに差があってわかりにくいので、一律1.2Gとして計算しなおします。
最低速度 最小旋回半径
I君A : 93km/h 57m
I君B : 90km/h 53m
N君B: 82km/h 44m
いずれの場合でも最小旋回半径の大きさの順番が最低速度の順番になっています。
ところで、欧州式の狙いの中に”旋回中は横方向だけにタイヤのグリップを使うことで、高いグリップを発揮することができる”みたいなことが書いてあります。
でも実測すると、欧州式的な走り方の方が多くの場合、最大横Gが低いです。
今回の場合、I君Bはうまく走れていないだけとしても、I君Aはそれなりに走れているにも関わらず横Gが低いです。
理屈からすると、最大横Gが発生するのは、前後Gが0のときで、このときは日本式でも、欧州式でも同じなので、きちんとしたクルマできちんとした人が走らせると、同等の最大横Gになると思いますが、そうでないクルマと人の組み合わせの場合は、欧州式的な走らせ方の方が最大横Gが低くなることの方が多いようです。
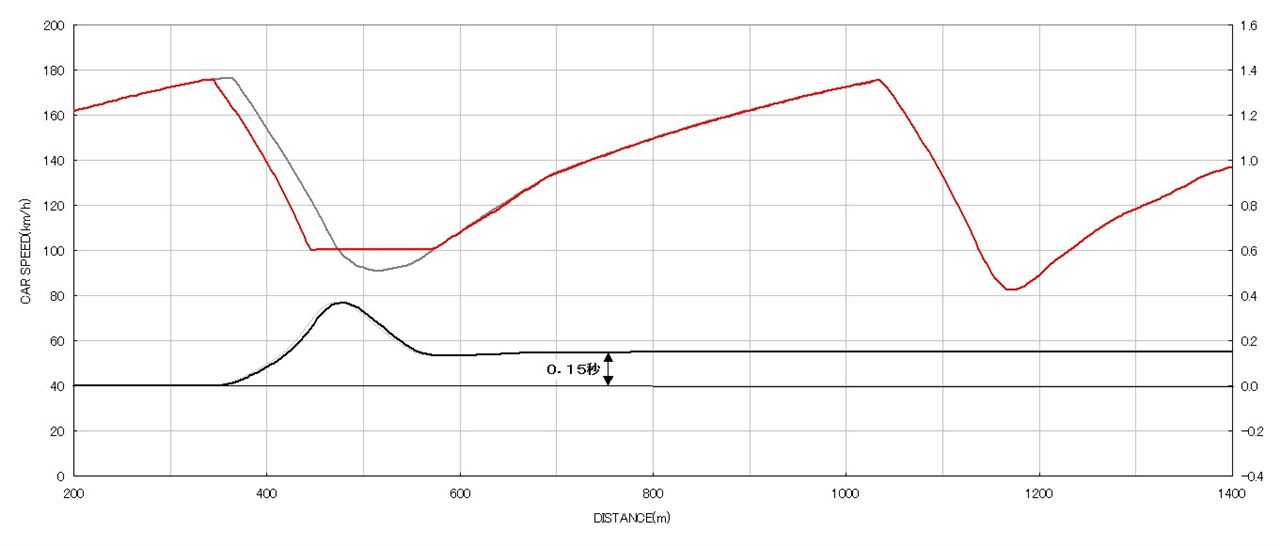
そこで、今度はきちんとしたクルマときちんとした人がパーフェクトな欧州式で走らせた場合をシミュレーションで再現し、それとN君Bを比較してみます。
赤がシミュレーションで、旋回半径は入り口から出口まで一律65mです。

650m付近では、0.1秒ほどN君Bの方が速いのですが、走行距離が5m長いので、その分を考慮すると、逆に0.1秒遅くなってしまいます。
しかし、その後に続く直線区間を合わせると、0.25秒速く走ることができています。
ここで、シミュレーションのグラフを見ていると、2コーナ後の直線区間で逆転されていることに気づくので、そうならないように、少しだけ旋回半径を小さくして直線区間で遅れないようにしてみます。
この時点ですでに欧州式ではない気もしますが、減速と旋回を同時に行わない減速時のみ欧州式でシミュレーションします。
旋回半径は61mで、加速時は走行距離1mにつき0.3mづつ半径を大きくしながら旋回中も加速しています。
これを減速時欧州式と名づけます。(欧州の人ゴメンなさい)

なんと!
驚いたことに、パーフェクト減速時欧州式にN君Bの日本式は0.1秒も負けてしまいました。
しかも、走行距離が3mほど長いので実質は0.2秒の負けです。
これでは、僕の立場がないので、N君Bの走行ラインをパーフェクトに走らせたシミュレーションをして比較しました。
同じ走行距離では0.15秒の勝ちです。
しかし、走行距離は長いので、実質は0.05秒となり、ほぼ同じになってしまいました。
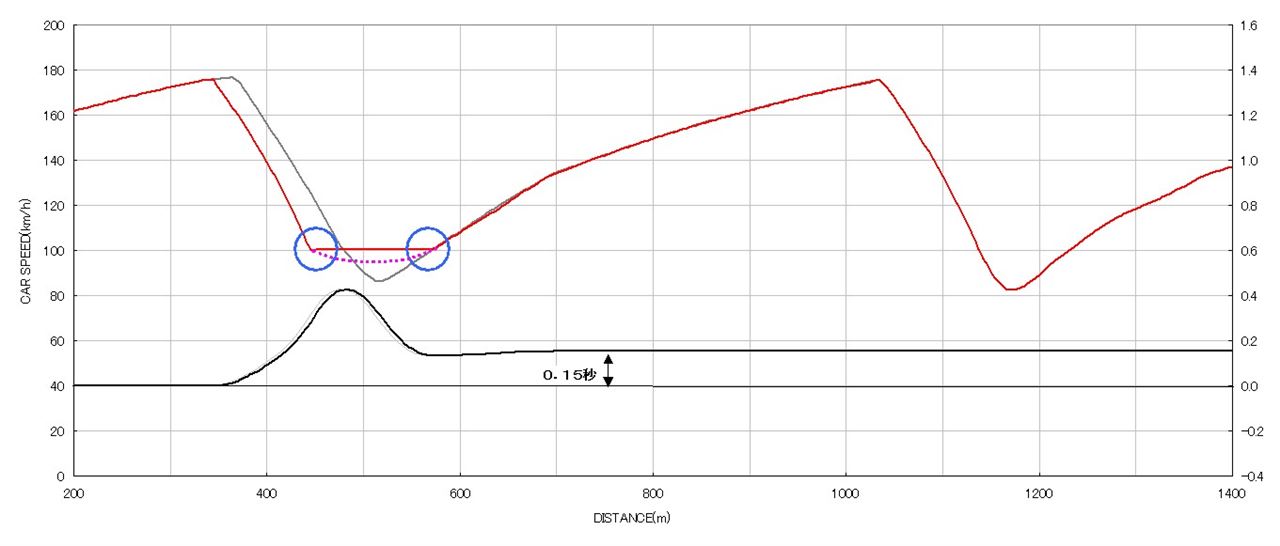
ただ、ここで注目して欲しいのが、減速時欧州式の減速→旋回、旋回→加速の部分です。
実際は、カキーンと曲がらないし、いきなり全開加速もできないので、点線のような速度カーブになるはずです。
そして、この点線のカーブはI君Aの速度カーブとほぼ重なります。
I君Aの区間タイムはN君Bの実測よりも遅いので、減速時欧州式をがんばっても0.2秒くらい日本式よりも遅いと考えられます。
ところで、N君Bの走行ラインなのですが、これは理想的なのか?と問われるとやや改善の余地があると思います。
改善ポイントは2つ
1、最小旋回半径を少し大きくする。 44m → 50m
2、走行距離を短くする。
2の走行距離を短くするについては、N君Bはちょっとブレーキで行き過ぎている感があるのと、最小旋回半径が小さいため、走行距離が長くなっています。
そこで、最小旋回半径と走行距離を最適化した走行ラインでシミュレーションしてみます。
走行ライン
緑:減速時欧州式 、 青:N君B実走 、 桃:最適走行ライン

この走行ラインは減速時欧州式に対し1.5mだけ走行距離が長いので、実質0.1秒速く走ることができています。
ここで、
アウト・イン・アウトを読まれた人の中に、”半径を小さくした方が走行距離は短くなるのではないか?”と思った人もいるかもしれません。
もてぎの東ヘアピンやTC2000の1コーナのような形状のヘアピンコーナは、コース内側の半径で走ったときが一番短くなります。
しかし、もてぎとTC1000の1,2コーナの場合は、1コーナの半径が小さく、1コーナと2コーナの間が直線的に結ばれているので、最小旋回半径を小さくすると走行距離が長くなる場合があります。
特に、もてぎの1,2コーナはこの影響が強いので、最小旋回半径を決めるに当たっては、走行距離が長くなりすぎないように注意しなければなりません。
今回の例はEK9シビック+Sタイヤなので、それ以外のクルマの場合は最適値が異なると思いますが、考え方は同じです。
ということで、7月5、6日のJOY耐に向けて1,2コーナの走り方を悩んでおられる方は、こういう視点で考えてみるとわかりやすいと思います。




























