前回は、パイオニアのナビを例に挙げ、一般的なナビではどういった仕組みで車の位置を測位するのかを説明しました。
ナビゲーションの仕組みについて
https://minkara.carview.co.jp/userid/2738704/blog/42931761/
では、マツダコネクトではどうなのでしょうか。
■マツダコネクトのブロック図
まずは、自車位置演算ユニット付き車の、マツダコネクトのブロック図です。

自車位置演算ユニットは、GPS信号と車速信号を受け取り、内部のジャイロを使って自車位置を測位します。そして自車位置情報をCMUに渡して、マツダコネクトナビゲーションがその自車位置情報を利用します。
■マツダコネクトの測位の仕組み
マツダコネクトがどのように自車位置を測位しているのか、想像してみます。
(1)自車位置演算ユニットでは内部で、GPSによる測位と、ジャイロと車速センサーを使った自律測位の2つを常に計算している。
(2)GPS測位の際にGPSの測位誤差も計算している。
これは自車位置演算ユニット内にジャイロがあり、外部から車速情報が供給されていることからも、容易に想像できます。
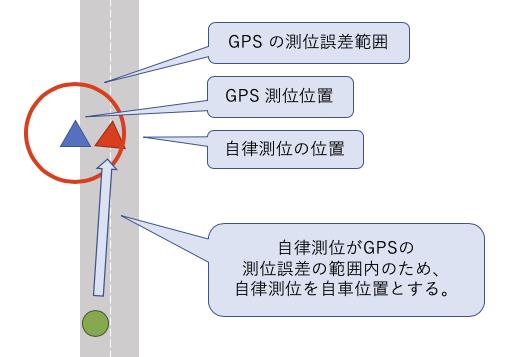
(3)自律測位がGPS測位の測位誤差の範囲内であれば、自律測位を採用し、自車位置としてCMUに渡す。
(4)自律測位がGPS測位の測位誤差の範囲を外れると、GPS測位を採用し、自車位置としてCMUに渡すとともに、自律測位につかう車速とジャイロを補正する。

まず、自車位置演算ユニットには地図情報はありません。ですから前回記事で説明した、地図を使ったマップマッチングという補正手法は使えません。
では車速情報やジャイロが何も補正(学習)がされないかというと、そういう訳でもなさそうです。

このように、「GPS衛星からの電波が良好に受信できる見通しの良い道でしばらく走行すると自車位置マークが地図上を正確に進むように」すると補正されるようです。
しかしながら、自車位置演算ユニットには、前述の通り GPS測位位置と、ジャイロと車速センサーの情報しかありません。

GPSが精度が高い状態、つまり「GPS衛星からの電波が良好に受信できる見通しの良い道」で、GPS測位と自律測位を比較し、誤差が生じているようであれば、自律測位に使われるジャイロや車速情報を補正しているのでしょう。
しかし、このやり方は大きな間違いです。
実際にはGPS測位位置にも誤差があります。
その誤差が正しい位置を中心に、均等にバラつくようであれば、補正を繰り返すことで誤差が相殺されて精度が高まりますが、GPS測位は誤差が特定の方向に偏って出ることもあります。
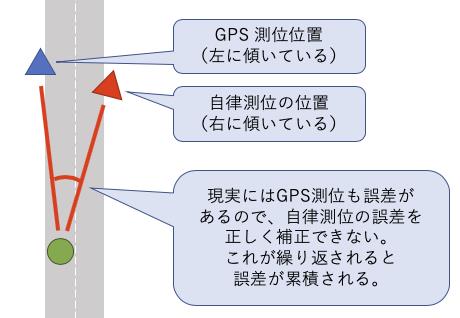
GPS測位が特定の方向に偏った場合は、この補正方法では、誤差を相殺するどころか、誤差を累積させる恐れもあります。
(5)CMU側では、マップマッチングを表示時の補正(道の上に車を置く)のためだけに使っている
すでに書いた通り、地図情報はCMUしか持っていません。よって自車位置演算ユニット内で測位精度を補正するために地図情報を使っているとは考えにくく、表示をするときに、自車位置を道路の上に表示するためだけにマップマッチングが使われていると考えられます。
■自車位置演算ユニット付き車で、なぜ突然位置飛びが発生するのか
このように想像したマツダコネクトの測位の仕組みが、本当に正しいかどうかはわかりません。
しかし、こういった仕組みだと仮定すると、自車位置演算ユニット付き車で、突然位置飛びが発生する理由も説明できるのです。
AngelKiss さんの自車位置演算ユニット付き車(CX-8)で、突然位置飛びが発生する状況の動画です。
(AngelKiss さん、マツダの真価が分かるのはこれから・・・、より)
まず、普段の状態、つまり「GPS衛星からの電波が良好に受信できる状態」では GPS 測位の精度も高く、GPSの測位誤差範囲も小さい状態です。


ですからもし自律測位が右に逸れても、GPSの測位誤差範囲を飛び出してしまうために、自律測位が採用されることはなく、GPS測位が自車位置として使われます。
しかし、道路の真上に高速道路が覆いかぶさるように重なると、「GPS衛星からの電波が良好に受信できる状態」ではなくなり、GPS測位誤差範囲が大きくなります。

そうなると、自律測位が右に傾いていても、GPS測位の測位誤差の範囲内ということで、自律測位が自車位置として採用され、CMUに渡されます。
ただし、この状態ではまだ自車位置が道路から飛び出すという状況にはなりません。

それは、CMU 内部で処理され地図上に表示されるときに、マップマッチングによって道路上に表示されるからです。
ただし、このときに自律測位による自車位置は微妙に道路より右側を向いているため、道路が左に傾くことになります。
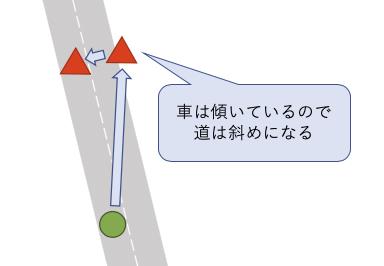
動画でもこのように表現されています。

こんな感じです。自律測位に誤差があるため、道路がほんの少しフラフラ傾くようになります。
さて、更に道路の真上に高速道路が覆いかぶさるように重なり、GPS衛星からの電波が良好に受信しずらくなり、GPS の測位誤差範囲はさらに大きくなります。
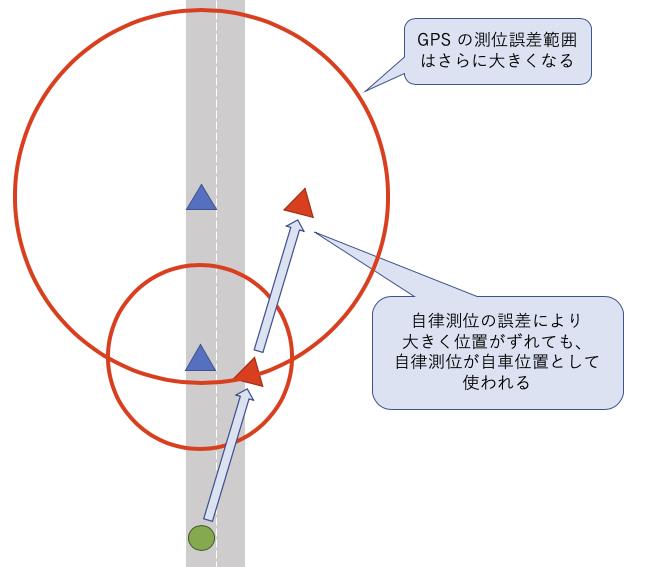
よって、自律測位が大きくずれても、引き続き自律測位が自車位置として使われ続けます。
このとき、表示上はマップマッチングにより自車位置が道から逸れているとは気付きません。

しかし、あるところで突然、隣の道にマップマッチングされるようになります。
このため、「突然位置飛びが発生した」ように見えるのではないでしょうか。

あとは、GPS衛星からの電波が良好に受信できるようになって GPS の測位誤差範囲が小さくなるまで、自車位置はフラフラと移動し続けます。

交差点で戻るのも、停止中に一時的にGPS測位が安定し、GPS測位誤差範囲が小さくなるからではないでしょうか。

道路を被さるような高速道路がなくなり、GPS の測位誤差範囲が小さくなると、今まで大きくずれていた自律測位がGPSの測位誤差の範囲も外れ、GPS測位を自車位置としてCMUに渡します。
これにより GPS測位がある程度正しければ、自車位置が本来の位置に戻るのです。
マップマッチングの詳細な手法や、GPS測位と自律測位が大きくずれた場合に、どうやってどちらに合わせるのか、マップマッチングされなくなる時があるのはどうしてか、なぜ実際は右側ばかりに逸れるのか、など説明しきれていない部分もありますが、大まかにはこんな仕組みにより位置飛びが発生すると考えた方が、ノイズやら故障やらを原因と考えるよりも、より矛盾なく不具合現象を説明できます。
■突然位置飛びが発生する別のケース
こちらも自車位置演算ユニット付き車で、突然位置飛びが発生しています。
(ぷんぷんぷ~んさん、再CX-8ナビ不具合、より)
動画を見るとわかりますが、ぷんぷんぷ~んさんの場合も突然位置飛びが発生します。
しかし AngelKiss さんの動画と異なるのは、いきなり別の道に飛ぶのではないという点です。

これは、本来の道までの距離が遠すぎて、マップマッチングされなくなったのが原因ではないかと想像します。
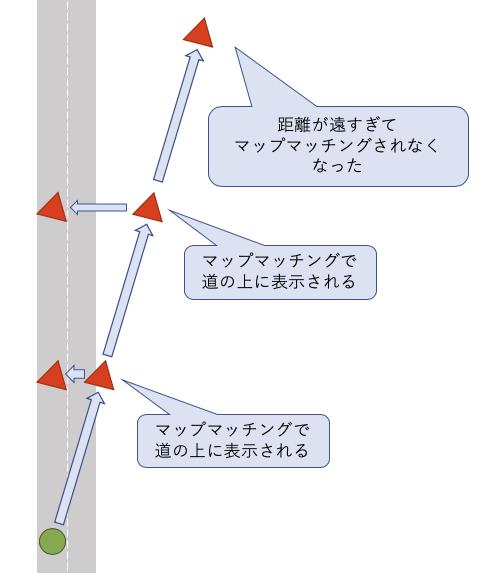
とはいえ、位置飛びした後もずっとマップマッチングがされていない理由についてはよくわかりません。マップマッチングの距離(強さ)も可変なのかもしれません。
■Mazda3 は大丈夫なのか?
Mazda3 は旧型マツコネと違い、ハードウェアはパナソニック製だそうです。
どこの馬の骨が作ったのかよくわからない、旧型マツコネとは大違いです。
しかも OS はあのトヨタと共用。
ナビは従来のミックウェア製ですが、この不具合の原因が私の推測通りだとしたら、ミックウェアには罪はありません。
では Mazda3 では大丈夫なのでしょうか。
気になっている自律測位の補正方法をマニュアルから探してみます。

旧型マツダコネクトと全く同じ補正方法です。
つまり、パイオニアのような高精度な補正は行なっていない可能性が高いということ。
大丈夫でしょうか・・・、不安になってきました。
■伏して皆さんにお願い
以前のブログでもお願いしましたが、皆さんのマツダコネクト装着車の調子をコメント欄に書き込んでいただけませんでしょうか。
・広い駐車場で360度転回すると、ナビ上でも元の方角に戻るか。
・元の方角に戻らない場合、工場出荷時リセットをすると改善するか。
しかしながら、工場出荷時リセットはお手数だとは思います。
しかし、360度転回だけでも、試していただけないでしょうか。
これぐらいズレたとか、まったくズレなかったとか、そういった情報を頂けると助かります。




























