2014年ごろに何度か書いていたドライビングスタイルの続きでです。
そもそもの発端は、オートスポーツでドライビングスタイルには日本式と欧州式があるという特集があって、その内容があまりに解せなかったことです。
まずは、もう一度 日本式と欧州式をおさらいします。
日本式・・・加減速を重視し、ブレーキはクリッピングまで残す走り方
欧州式・・・コーナリング速度を重視し、減速は直線で終わらせて、コーナは一定速度で走る走り方
この説明で特に解せないのが欧州式の「減速は直線で終わらせる」というところです。
F1のオンボードカメラを見ても、スーパーフォーミュラの欧州ドライバーの運転を見ても、減速を直線で終わらせるドライバーなんて一人もいないのです。
なのに「減速は直線で終わらせる」と書いている。
しかも特定のだれか一人の話として書いているのではなく、複数のドライバーが同じようなことを話しているようでした。
誰もしていないことを、複数のドライバーがしていると言うのは非常に不可解です。
何らかの違いが日本式ドライビングと欧州式ドライビングの間にあるはずなので、その何らかの違いとは何のことを言っているのか?というのが僕にとっての謎でした。
最近やたらとF1やらJBのオンボード映像の解析をしていたのは、解析することで何かわかることがあるのではないか?という想いもあってのことです。
そして遂に謎は解けました!
100%ではないけど、自分としては十分納得です。
今回はシビックタイプRのハンガロリンク 1コーナ走行データを使って説明したいと思います。
解析をするにあたり、重要なことのひとつとして走行データは正しいのか?ということがあります。
正しくないデータでいろいろ考察しても正しくない結果しか得られません。
以前、6、7コーナの走行データを確認した結果から、走行データは正しそうだと結論づけました。
でも1コーナの走行データを確認していたら前後Gが速度データを合っていないことがわかりました。
オレンジ色はオンボード映像画面に表示されている前後Gの値で、桃色は速度から計算で得られた値です。
具体的には、(その時の速度-一つ前の速度)/0.1/3.6(m/sec2)で計算した値を0.1秒ごとの0.3秒区間で移動平均しました。
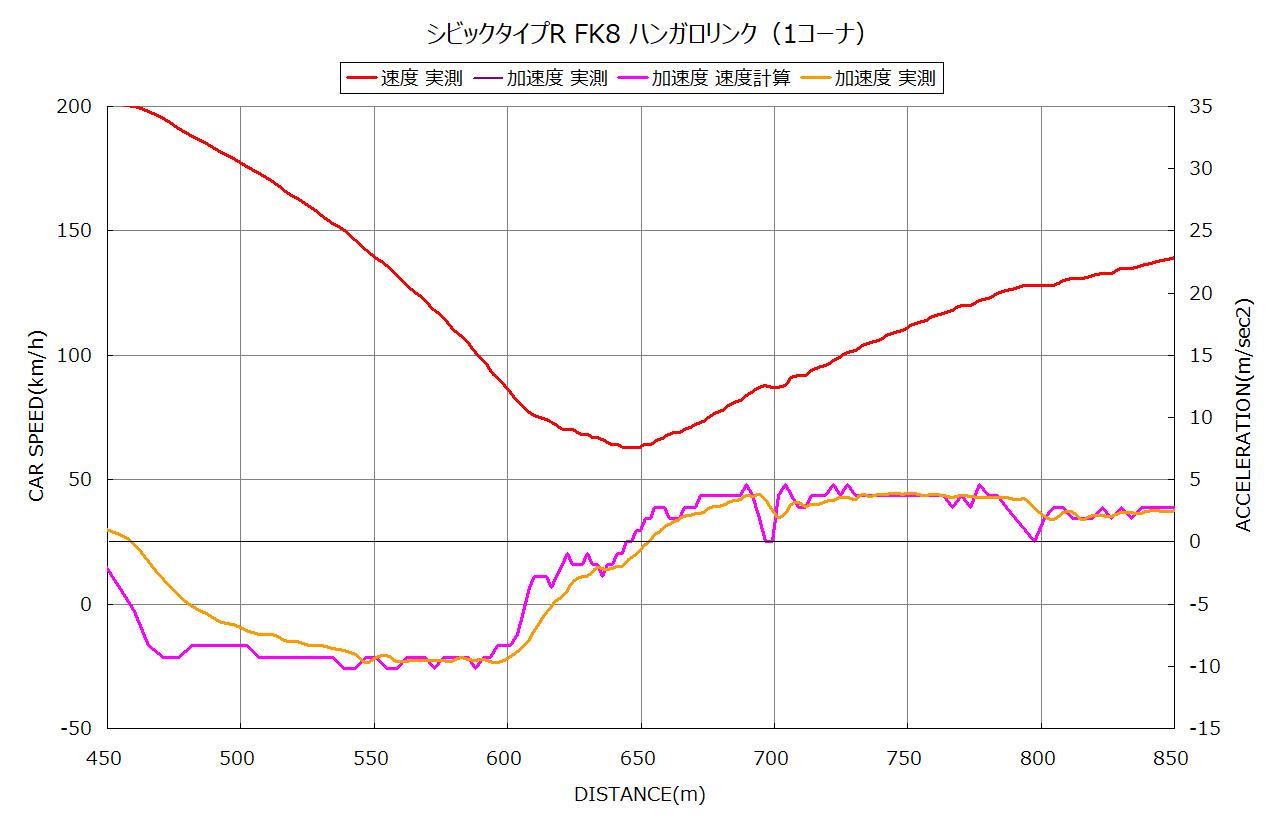
速度から前後Gを計算するとグラフがギザギザになって見にくいのですが、速度から計算しているだけに、速度とは相関が取れています。
このグラフを見ると、速度から計算した値と画面表示の値が10~20mズレがあって、かつ画面表示の値が全体的になまされていることがわかります。
本当は速度が正しいのか前後Gが正しいのかわからないのですが、一般的には速度は正しく測定できているので、今回は速度と速度から計算した前後Gが正しいとして考えることにします。
次にこの走行データに合うようにシミュレーションの合わせこみをしました。
いつもは5m毎に走行ラインの曲率半径を決めていますが、5m毎だと今回の解析には不十分なため、1m毎としました。
赤と桃が実際の走行データ、青と水色がシミュレーションの合わせこみです。
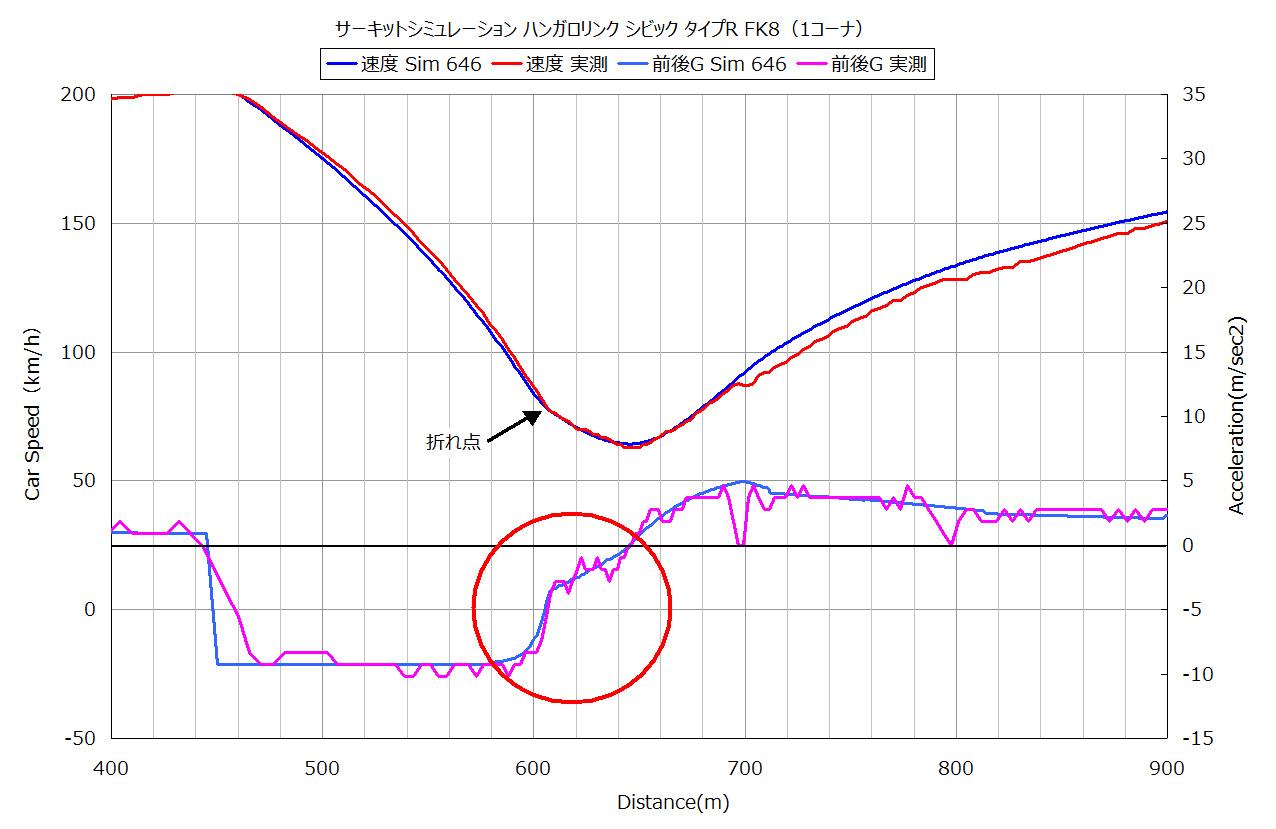
減速区間がちょっと合ってませんが、次に行う日本式走行ラインでのシミュレーションも同じ条件で計算するので、今回は無理に合わせこみはしませんでした。
ここで赤丸で囲ったところをご覧ください。
6月30日のブログでも同じようなこと書いたのですが、このグラフの方がわかりやすいです。
赤丸で囲ったところはコーナ入り口の減速Gの変化を表しています。
実測もシミュレーションの合わせこみ結果もどちらも605m付近で急に減速Gが低下していることがわかります。
僕の推測ではこれがオートスポーツで言われている欧州式のことです。
速度カーブに折れ点があるのが特徴です。
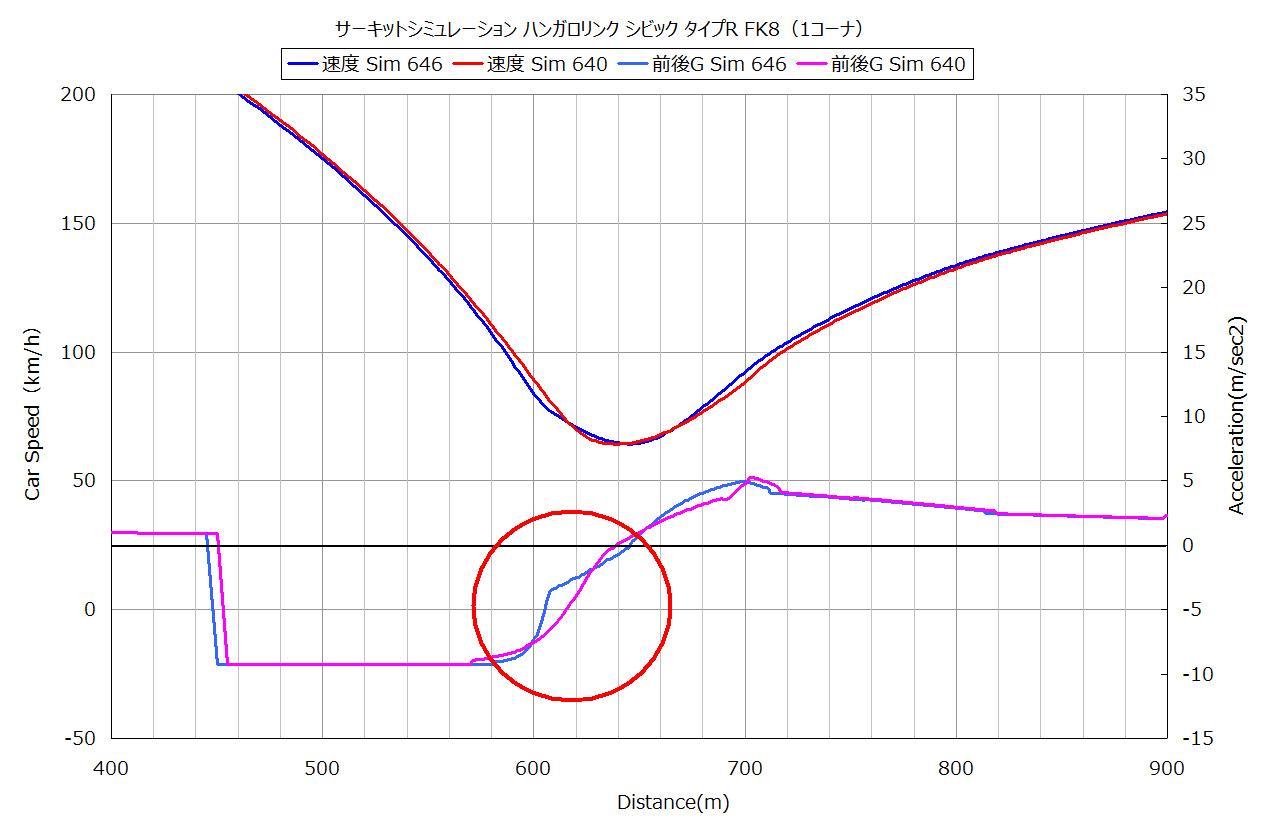
では日本式ってどういうの?ってことになるので、さきほどの合わせこみ条件の走行ラインのみ変更してシミュレーションしました。
日本式の場合は、コーナリング中も減速を続けているので、減速Gが急に低下しないような走行ラインにする必要があります。
減速Gが急に低下しないようにするためには、曲率半径の変化が緩やかになっていればよいので、そのような走行ラインに設定します。
しかし、そうすると最小旋回半径の位置が少しコーナ手前になるので、今回は6mだけ手前になるような走行ラインとしました。
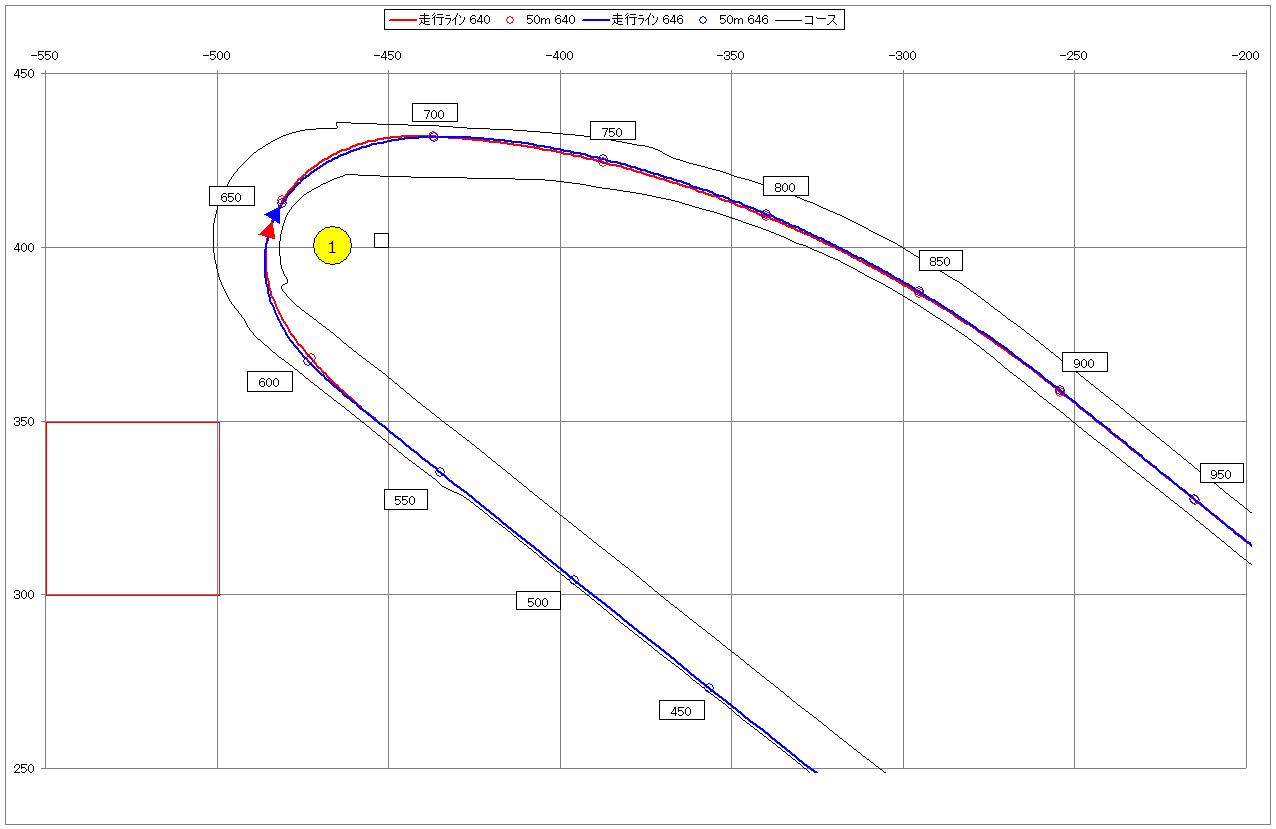
(グラフ中の646と640は最小旋回半径のスタートラインからの距離です。646は欧州式、640は日本式)
青:実測へのシミュレーション合わせこみ=欧州式
赤:日本式のシミュレーション
走行ライン
またまた赤丸で囲ったところをご覧ください。
速度変化や走行ラインは微妙に違うだけですが、減速Gの変化は大きく異なります。
水色の方は3m/sec2(0.3G)くらいまで急に減速Gが低下しているので、実際の操作としては「ブレーキをぱっと離す」ような運転になっていると思います。
実際は、エンジンブレーキで発生する減速Gは0.15Gくらいしかないので、少しはブレーキを踏んでるのですが、気持ち的にはブレーキを踏んでいないのだと思います。
だから欧州式の説明をする人はみんな「コーナ中はブレーキを踏まない」と言うのだと思います。
一方の日本式はコーナ入り口から最低速度にまで徐々にブレーキを緩めていっているので、クリッピングポイントまでブレーキを残す走り方になっています。
ではどちらの方が速いのか?ってことが気になるので計算結果を見てみます。
今回は1コーナと2コーナの間の1000m地点までの区間タイムと、通過速度を比較します。
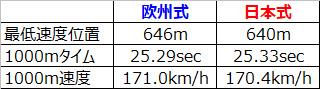
欧州式の方が1000mまでの区間タイムも早く、通過速度も高くなっており、欧州式の方が速いことがわかります。
区間タイムでは、たった0.04秒しかないので、ほとんど誤差みたいなものなのですが、コーナが10個あったら0.4秒差となり、全く無視できません。
したがって、欧州式をすすめる人が多いってことなのだろうと思います。
ところで、日本にも欧州にもコーナ中にブレーキを踏まないプロドライバーはいないので、オートスポーツの言う欧州式で走る人は一人もいません。
でも、今回僕の考えた欧州式(コーナ入り口でブレーキを急に緩める)で走るプロドライバーは日本にもたくさんいます。
たぶん、プロドライバーは程度の差こそあれ、みんな欧州式です。
今度機会があったら(あまりないけど)プロドライバーの速度カーブをよく見てください。
速度カーブのフルブレーキングから旋回始めのところに折れ点があることが多いです。
プロ、アマに関係なく、速いドライバーは折れ点のある速度カーブになっていることが多いです。
速度カーブに折れ点がある=減速Gの変化が急激=ブレーキを急に緩める=欧州式です。
ということで、今まで世の中に欧州式で走るプロドライバーいない!!と散々書いてきましたが、訂正します。
プロドライバーは日本、欧州にかかわらず、みんな欧州式で走っています。
ただし、欧州式でもコーナ中にブレーキは踏んでいて、コーナ中の最低速度が日本式と比べて高いわけでもありません。
コーナ中の最低速度位置が少し奥になるような走行ライン上を摩擦円の縁で走る走り方のことを欧州式と言っている というのが僕の欧州式に対する結論です。
結局のところ
2014年7月12日のブログと同じ結論なのですが、このときは減速Gの変化をきちんと見ておらず、ブレーキを急に緩めないと欧州式の走り方にならないということに気が付きませんでした。
ところで、ではどうして、コーナ中の最低速度位置が少し奥だと速く走れるのか?と聞かれてもわかりやすく説明できないので、引き続き考えます。







































