
今日は舞洲で、
D練でした!!
午前はパート練習で、
3つあるコースを
自由に走って、
午後からはタイムアタック。
午前のパート練習は、
タイム計測がないので、
何も考えず、
ひたすら走って終わりという、
マンネリな練習になりがち。
そこで、
タイム計測アプリを使って、
1本走って、そのタイムを基準に
目標タイムを決めて走るようにしています。
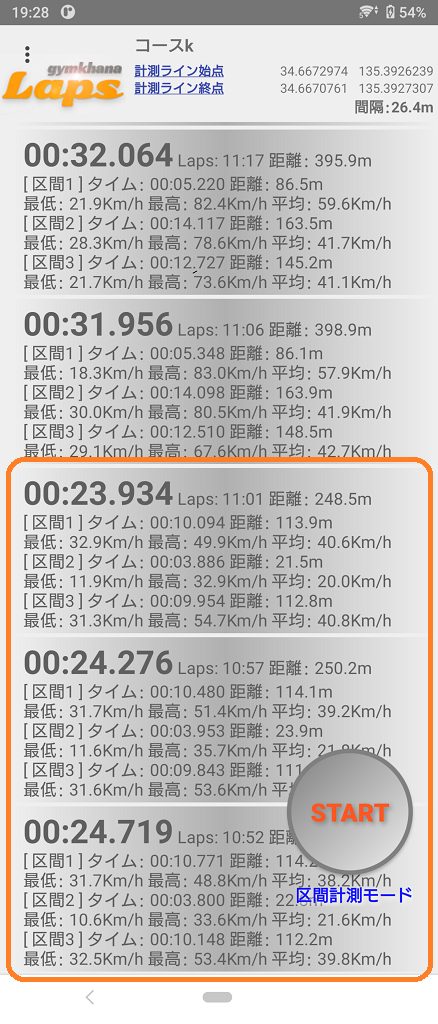
10本ほどのパイロンのスラロームで、
行って、最後のパイロンはサイドターンで帰ってくるコース。
最後のパイロンの手前に計測ラインを設定すると、
行きのスラローム、サイドターン、帰りのスラロームのタイムが計測できます。
1本目が24.7でしたので、目標を23.9にしました。
走り終わったら、全体のタイムと区間タイム、距離を確認。
どこをどうやって詰めるか決めてから、次の走行。
3本目であっさりと目標達成。

2速ふけ切るぐらいのストレートからのフルブレーキングで、定常円。
定常円を抜けて、8の字を描くように反対向きの定常円というコース。
ストレートエンドと定常円から次の定常円の間に計測ライン。
これで、スタートからの定常円手前までの区間、2つの定常円のタイムを
計測できます。
1本目が31.9でしたので、目標を31.0にしました。
このコースは目標達成まで7本かかりました。
こういった感じで、
練習のなかで、区間タイムを見ながら、
次の走行はどうやって走るか組み立てながら走って、
目標を達成できるとものすごく充実感が得られます。
アプリのダウンロードは
こちらです。
アプリの使い方は
こちらです。
アプリを使う時ですが、
DG-PRO1 か デジスパイスを使ってください。
スマホ内蔵GPSだと、誤差がありすぎて、
タイムがあまり参考にならないです。
ポチッとして頂けると、
次のコンテンツを作成する励みになります♪

Posted at 2023/07/08 20:10:34 | |
トラックバック(0) | 日記
 時速36キロで
時速36キロで
 今年はいつも以上に
今年はいつも以上に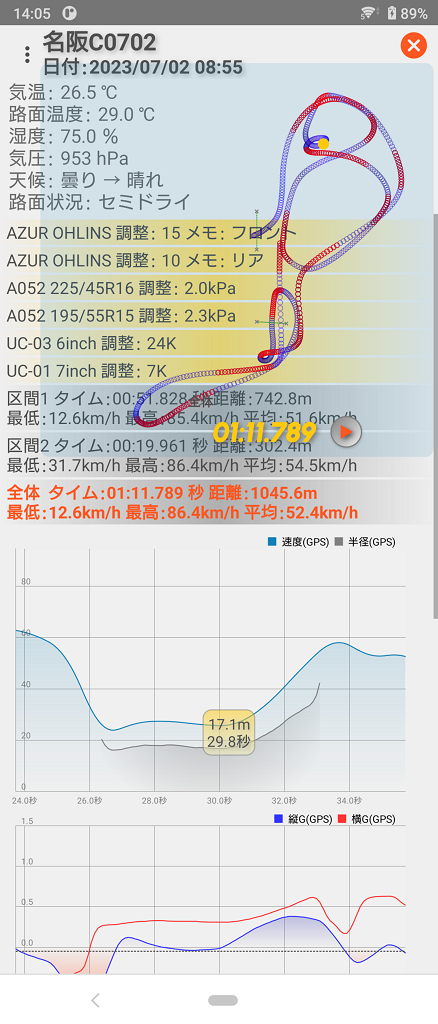

 私自身が自身が
私自身が自身が 今日は舞洲で、
今日は舞洲で、 この前の話ですが、、、
この前の話ですが、、、

