GPS走行解析アプリ(Archive pro 4.16)を
リリースしました。
今回のリリースは、
加速度をテーマにした修正です。
加速度を測定するのに、大きく分けて2つ方法があります。
ひとつは加速度センサーによる測定、
もうひとつはGPSの位置情報からの計算です。
さらに加速度センサーには、
用途別に3種類のセンサー方式が存在します。
高い周波数計測・高い加速度(衝撃)を計測するための圧電式、
これは自動車の衝突検知や機器の振動計測で使用されています。
次に、スマホやゲーム機などで本体の動きを計測するためのピエゾ抵抗型。
そして、自動車 車体制御に使われている静電容量型です。
走行解析で使用するのは、静電容量型の測定値です。
レースなどで使用されている本格的なデータロガーは静電容量型と思われます。
また、最近のクルマに搭載されているOBDなどの外部インタフェースを使用して、
車体制御に使われている情報を取得する方法などがあります。
残念ながら、スマホに搭載されているピエゾ抵抗型の測定値は、
使い物にならない情報です。
なので、これまでGPSの位置情報から計算して、
グラフ表示していました。
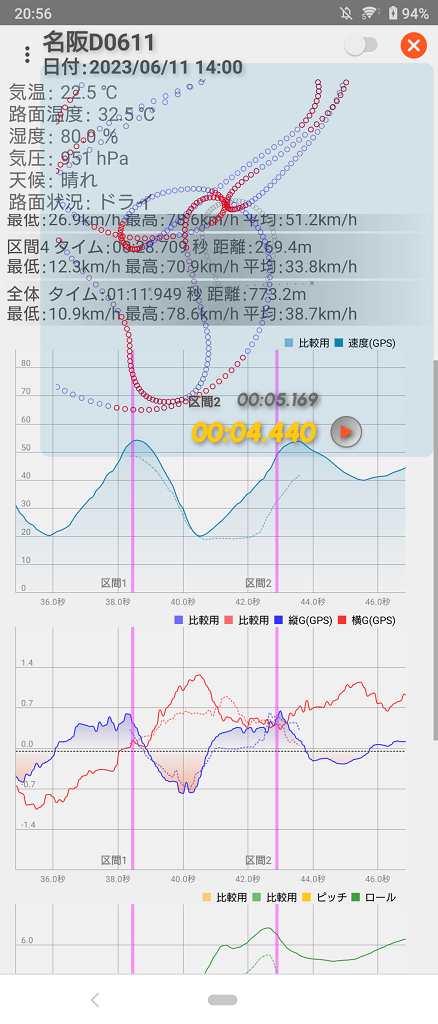
走行解析で使用する加速度は、縦Gと横Gです。
縦G(gy)は加速と減速を単位時間当たりの速度の変化でとらえることができます。
横G(gx)については、向心加速度とよばれるもので、
円運動で発生する遠心力に対する向心力の加速度です。
計算する公式は、高校の物理で習います。
GPSの位置情報から計算するには、少し工夫が必要です。
向心加速度の公式(gx = v * v / r)の示す通り、
速度(v)の2乗、コーナリング半径(r)の影響うけます。
GPSの位置情報から計算すると、
どうしても不安定な値(ばらつきがでる)になってしまいます。

今回のリリースでは、
不安定な値をB-スプライン曲線を使用して、
平準化を行いました。
その上で、平準化した向心加速度と速度からコーナリング半径を
算出する方式に変更しました。
これまで記録した走行データの加速度は、
加速度センサーによる測定を記録していましたが、
今回のリリース以降は、
平準化した加速度を記録するように変更しています。
このため、
これまで記録した走行データは、
コンバージョンが必要になります。
コンバージョンするには、走行データ画面のメニューにある
「走行データを平準化する」を実行します。
B-スプライン曲線を使用した走行データの平準化ですが、
平準化の度合い(滑らかさ)をパラメータ(COMPLEMENT)で調整できます。
パラメータ値は既定値が5で、
10(滑らか=補正が強い) ~ 1(補正が弱い) の範囲で設定します。
コーナリング半径の表示ですが、
前例のない試みで、
サイドターンを含む低速コーナーで何かしらの違い(変化)を可視化できるのでは?
というもので、何が正解とかそういった情報はありません。
これからの評価で確認していく内容です。
アプリのダウンロードは
こちらです。
アプリの使い方は
こちらです。
ポチッとして頂けると、
次のコンテンツを作成する励みになります♪

Posted at 2023/06/29 09:46:32 | |
トラックバック(0) | 日記
 GPS走行解析アプリ(Archive pro 4.16)を
GPS走行解析アプリ(Archive pro 4.16)を

 デジスパイスの解析ソフトが、
デジスパイスの解析ソフトが、 大阪万博の開催で、
大阪万博の開催で、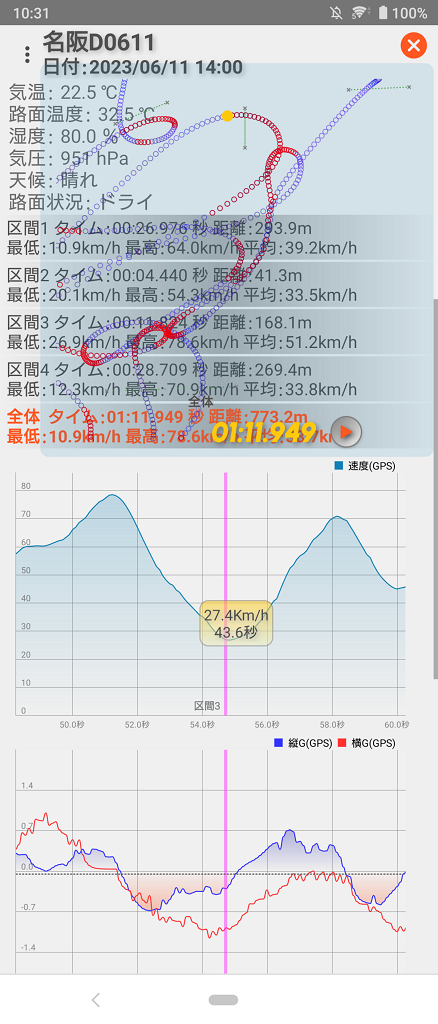
 日曜日は、
日曜日は、