みなさま お姉様 ごきげんよう♪
フルコンであるところの
MegaSquirt:メガスク の全域O2センサーを用いた①燃料噴射量のフィードバック補正と②燃料噴射量に関わるVE(充填率)マップの学習 について解説してみたりしますわね
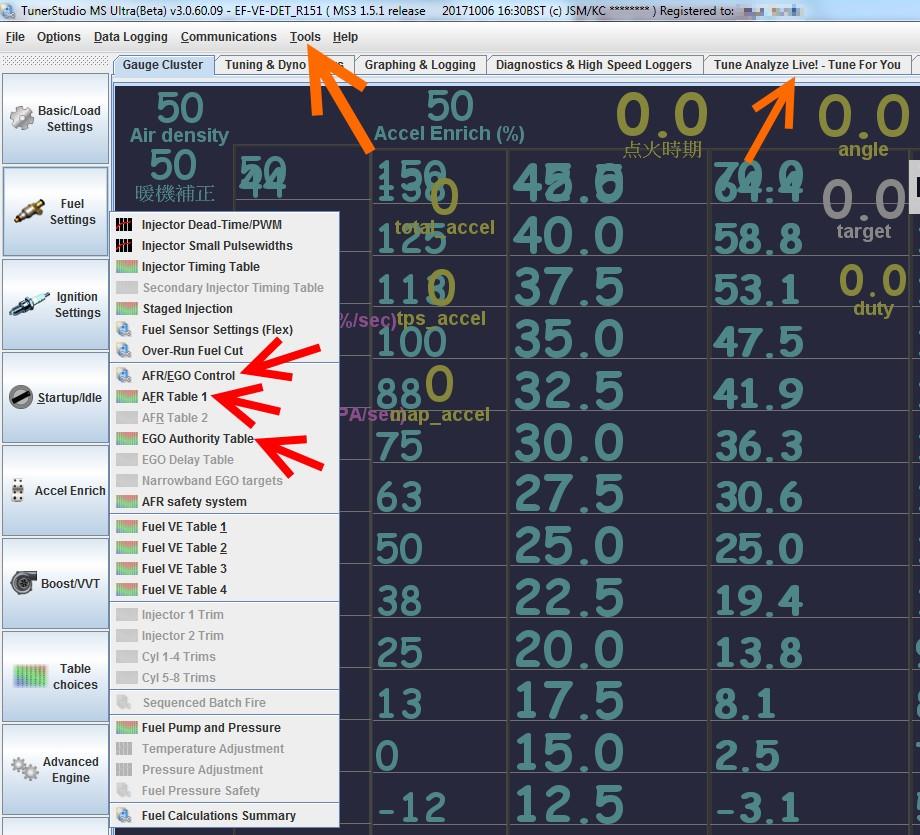
①②をするためには矢印の箇所をアレコレしなければなりませんの
まずは使用する全域O2センサー出力(0~5V)と空燃比値との関係を設定いたします

EGO SENSOR=空燃比計
プルダウンメニューの中に使用している空燃比計の設定が無い時は[Custom Linear WB] を選択して Point1&2に電圧と空燃比を入力します
そして[Write to controller]です
これで空燃比計の設定は完了なのですわ
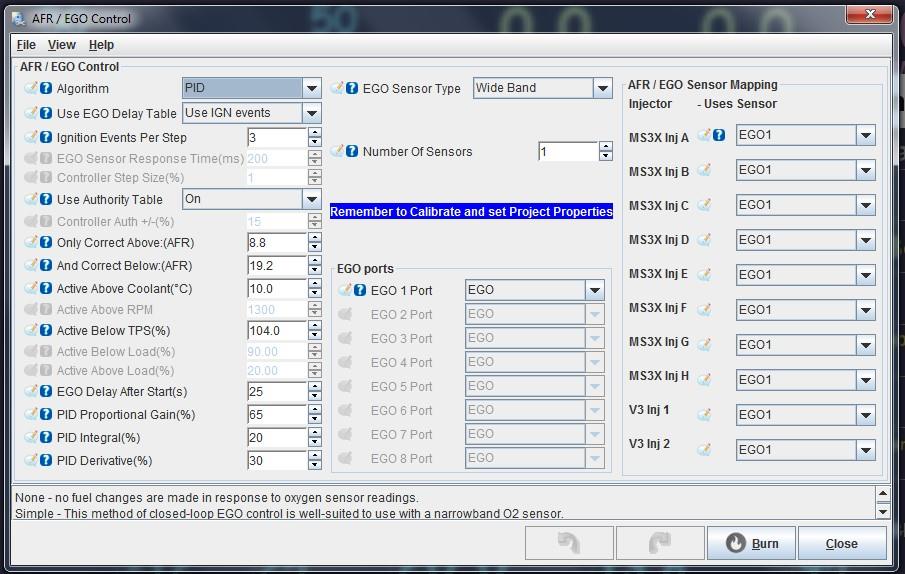
燃料噴射量を全域O2センサーの計測値に従い 希望の空燃比にするために増やしたり 減らしたりするフィードバック補正(EGO)の設定です(画像はミラバンで使用している設定ですわ)
Algorithm
• Simple – This method of closed-loop EGO control is well-suited to use with a narrowband O2 sensor.
• PID – This closed-loop method incorporates a Proportional Integral Derivative control-loop which (when tuned properly) adjusts the amount of fuel being injected to quickly get to the target, and then maintains the target without any oscillation.
• No correction – no fuel changes are made in response to oxygen sensor readings, but the sensors will be read and can be datalogged.
アルゴリズム
•シンプル - この閉ループEGO制御方法は、狭帯域O2センサーでの使用に適しています。
•PID - この閉ループ方式には比例積分微分制御ループが組み込まれており、適切に調整された場合、注入される燃料の量を調整してターゲットに素早く到達させた後、振動を起こさずにターゲットを維持します。
•補正なし - 酸素センサーの読み取り値に応じて燃料を変更しませんが、センサーは読み取られ、データロギングが可能です。
Use EGO Delay Table
Specifies whether to use IGN events or delay table to determine how often EGO runs.
EGO遅延テーブルを使用する
下記のA:IGNイベント設定を使用するかB:遅延テーブルを使用してEGOの実行頻度を決定するかを指定します
A:Ignition Events Per Step
The number of ignition events between each correction
A:ステップごとのイグニッションイベント
各補正間の点火イベントの数
B:EGO Sensor Response Time
Static value representing O2 sensor response time which is added to the EGO delay table value.
B:Controller Step Size (%)
Controls how large each correction 'step' is.
B:EGOセンサー応答時間
EGO遅延テーブルの値に加算されるO2センサ応答時間を表す静的値。
B:コントローラステップサイズ(%)
それぞれの修正「ステップ」の大きさを制御します。
Use Authority Table
Enables a table of EGO authority based on RPM/load.
This allows greater control over when closed-loop EGO is operational and permits variable authority.
An authority of zero means there will be no correction made.
Normally the RPM and load axes should be set the same as the AFR tables.
権限表の使用
RPM /負荷に基づいてEGO権限のテーブルを有効にします。
これにより、クローズドループEGOが動作し、可変権限が許可されているときに、より大きな制御が可能になります。
ゼロの権限は、修正が行われないことを意味します。
通常、RPMと負荷軸はAFRテーブルと同じに設定する必要があります。
EGO Delay After Start (sec)
Only make correction when engine has been running at least this long.
エンジン始動後からフィードバック補正を始めるまで待つ時間(秒)
エンジンが少なくともこのように長い間実行されたときにのみ修正をしてください??
※フランソワが使っているTECH EDGEの空燃比計の場合 エンジン始動後15~20秒程は空燃比値は9となってしまうので25秒にしました
フィードバック補正をするためのPID設定
PID制御とは? こちらの説明が分かりやすいでしょうかね

The AFR Tables allow you to set values for target AFR vs RPM/load.
AFRテーブルでは、目標AFR対RPM /負荷の値を設定できます。
上の画像はプチリーンバーンとしているミラバンの設定です
みなさまはこれならエンジン壊れないゾという空燃比にしてくださいましね
実走時には この表の空燃比値へと燃料噴射量は増やしたり 減らしたりされます(フィードバック補正)
※VEマップの書き換え(学習)は行われません
※ツナスタを立ち上げたパソコンがつながっていなくとも このフィードバック補正機能はエンジンが暖気状態であれば常に働いております
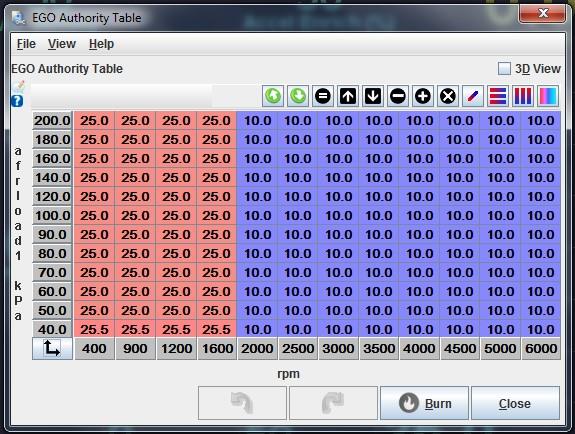
EGO Authority Table
Specifies the EGO authority limit across the range of engine operation condition.
Setting zero means there will be no change in fuel based on the lambda sensor i.e. open-loop mode.
EGO権限テーブル
エンジン動作条件の範囲でのEGO権限制限を指定します。
ゼロを設定することは、ラムダセンサ、すなわち開ループモードに基づいて燃料に変化がないことを意味する。
ざっくりと申せば 元の燃料噴射量に対してどのくらい(%)まではフィードバック補正で増減させても良いヨ そんな値でございましてよ
ということでありまして ここまでが ①燃料噴射量のフィードバック補正をさせるための設定なのであります
さて 次は②燃料噴射量に関わるVE(充填率)マップの学習の設定について書き出してゆきますわね
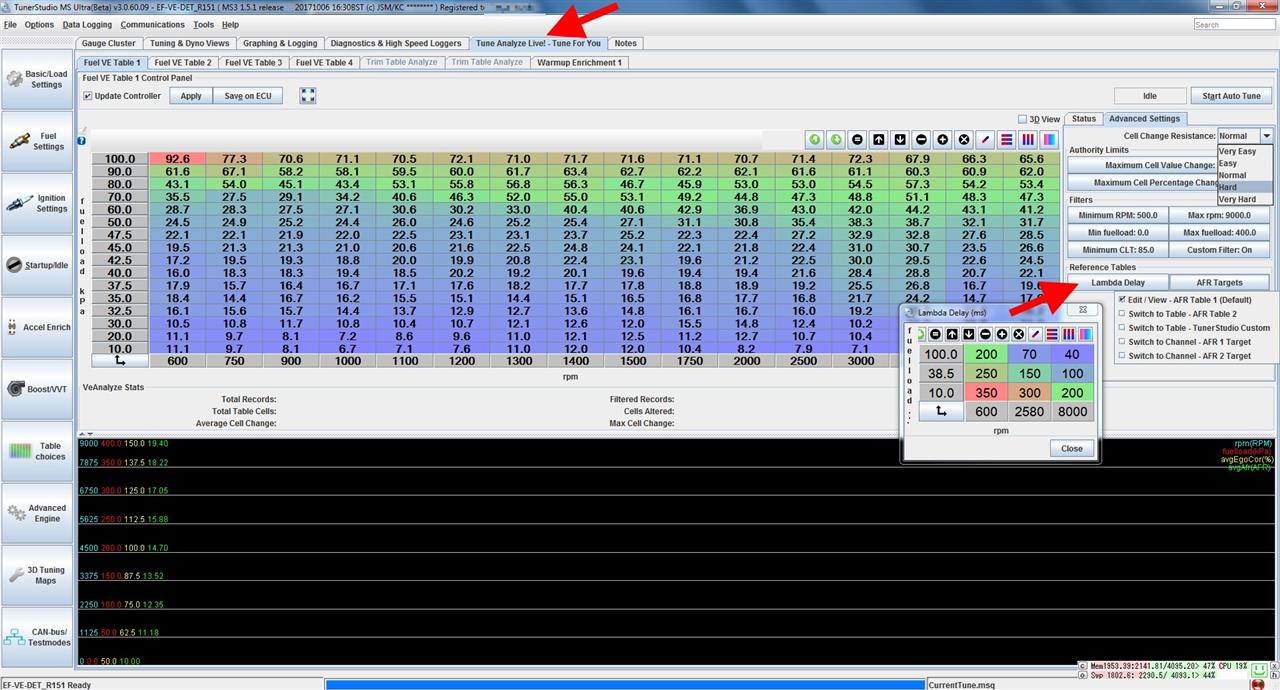
上のタブから[Tune Analyze Live!]を選びます
決して[Tune An○lイジリ Live!] ではありませんので そこは くれぐれも くれぐれも全裸にはならぬようにお気をつけくださいますね
※ご自身のを
”開発” するか 否かは それぞれの裁量にお任せいたしますわ
[Cell Change Resistance]でVEマップの書き換え度合いを設定出来ますわ
Very Easyですと ぎゅんぎゅん書き換えてくれます
[Lambda Delay]は使用している空燃比計の応答遅れの設定です
ここの値はきっちりと測りようがないのでデフォルト値のままにしてますわ
[AFR Targets] ↑で出てきたAFR TABLEの値が適用されます
[Edit/View-AFR Table 1 (Default)] の文字をクリック(左右どちらのボタンでもOK)するとAFR TABLE1のマップが開きます
エンジンが回っている時に[Start Auto Tune]ボタンを押せば VEマップの学習が行われます
学習された範囲はVEマップ上の数値の色が変化いたします
青:元の数値より学習値が大(元の値が目標空燃比よりもリーンであった)
赤:元の数値より学習値が小(元の値が目標空燃比よりもリッチであった)
エンジンを切る前にVEマップの学習を終えるには先ほどの[Start Auto Tune]を再クリック!ですわ

※VEマップの学習をした際にはmsqファイルはセーブするが吉!!でございましてよ
こんな按配でVEマップの学習を進めてゆきますと エンジンの表情(回り心地)も変わってゆきますわ
学習が進むと 雑味がとれて まろやか かつ クリーミーな味わいとなるかと
ではでは 良い結果が出ることを期待しまして 共に冥府魔道を進んでゆきましょうね


























































