みなさま お姉様 ごきげんよう♪
フルコンのMegaSquirtのClosed-Loop(アイドル安定化)の設定につきまして G○ogle先生にガンバってもらいました
ms3pro_ultimate_UserManual_1からの引用その2ですわ
MegaSquirtのHP
Megasquirt の説明書
Closed loop idle settings
閉ループアイドル設定
Closed loop idle lets the MS3Pro target a set idle speed instead of opening the IAC valve a set amount.
クローズドループアイドルは、ISC(IACバルブ)開度を固定とせず、設定アイドル回転数を目標とし、ISC開度を自動調整します。
【フルコン】 アイドル回転数と点火時期/ISC開度の関係@ミラバンのEF-VE 【メガスク】
This is used for compensating for changing engine loads.
これは、変化するエンジン負荷を補償し、目標回転数に保つために使用されます。
It should not be used to fix a roving or hunting idle at steady load - you need to get the idle tuned so it is stable in warmup mode under constant load first, if you find the idle is hunting.
安定した負荷でロービングまたはハンティングアイドルを修正するために使用すべきではありません。
アイドルが狩り中であることがわかっている場合は、まず最初に定負荷でウォームアップモードで安定するようにアイドル調整を行う必要があります。
(アイドル安定化機能は万能ではありません 事前にちゃんとVEテーブルを調整してアイドル回転数が大きく変化しても空燃比が一定であるようにアレコレしておく必要があります)
【フルコン】 AF(空燃比)を変えるとアイドル回転数はどれだけ変わるのかしら?@ミラバンのEF-VE 【メガスク】
【フルコン】 ISCのTestmodeを使ったアイドリング時のVEマップ学習 【メガスク】
The MS3Pro uses the engine state settings to determine if the ECU should engage closed loop idle.
MS3Proはエンジンの状態設定を使用して、ECUが閉ループアイドリングに関与するかどうかを判断します。
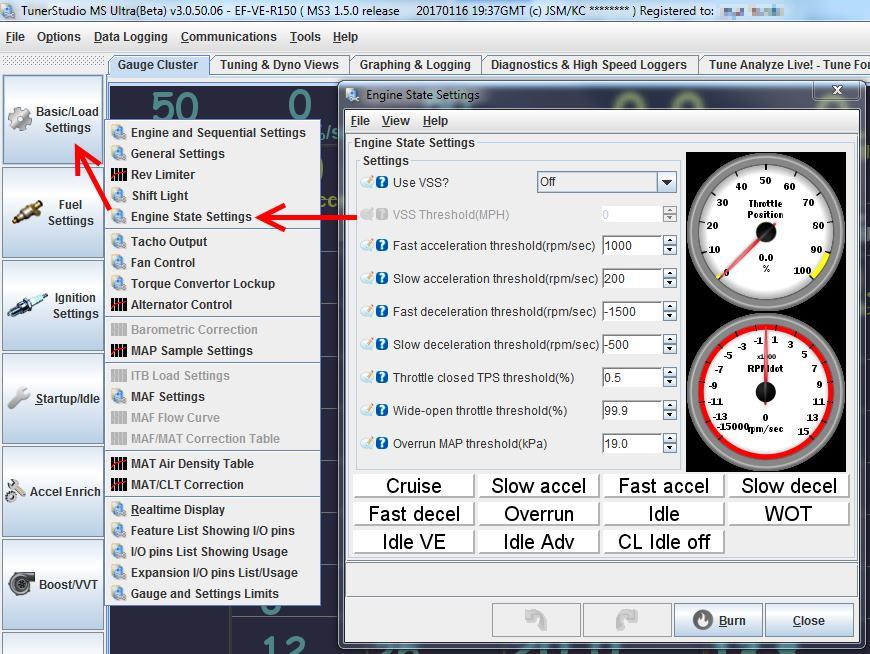
The rate of RPM change needs to be below both the slow acceleration threshold and the slow deceleration threshold, and the TPS needs to be below the throttle closed TPS threshold.
RPMの変化率は、低速の加速スレッショルドと低速の減速スレッショルドの両方を下回る必要があり、TPSはスロットルが閉じたTPSスレッショルド(アイドル判定スロットル開度)を下回る必要があります。
The Closed Loop Idle Valve settings tell the MS3Pro what range of valve opening to use and where to set the valve when closed loop idle engages.
閉ループアイドルバルブの設定は、MS3Proに、使用するISCバルブ開度の範囲と、閉ループアイドリング時のISCバルブの設定位置を指示します。
Note that this screen will change between “steps” or “duty” depending on whether you have enabled a stepper or PWM idle control valve.
ステッパまたはPWMアイドル制御バルブ(ISC)を有効にしたかどうかによって、「ステップ」または「デューティ」の間で変更されます。
• Idle Valve Minimum Duty or Minimum Steps - This specifies the lowest duty or number of steps, below which changes in the opening position no longer affect RPM. The closed loop control will not set the IAC valve to a lower number.
•アイドルバルブの最小デューティまたは最小ステップ - 最小デューティまたはステップ数を指定します。これ以下では、開位置の変化がRPMに影響しなくなります。閉ループ制御はIACバルブをより低い数に設定しません。
全くの無負荷でアイドル回転数が希望回転数となる値にしておくが吉!ですわ
• Idle Valve Maximum Duty or Maximum Steps - This specifies the highest IAC position beyond which further changes do not affect RPM.
Note that intentionally setting this low can make the closed loop idle a bit less sensitive and more stable.
•アイドルバルブの最大デューティまたは最大ステップ - それ以上の変化がRPMに影響を与えない最高のIACポジションを指定します。
この値を意図的に低く設定すると、閉ループアイドルを少し敏感でなく安定させることができます。
まずは95辺りでよいでしょう
ISCが開きすぎてアイドルが狩りを行うようになったら この値を減らし ISC開度を抑えます
• Dashpot Adder - The MS3Pro will disengage the closed loop idle based on TPS or other criteria.
Once the TPS reading falls below the value set by “throttle closed TPS threshold” in Engine State Settings, the MS3Pro will add this amount to the current IAC valve opening to prevent the RPM from falling too quickly and making the engine stall.
•Dashpot加算器 - MS3Proは、TPSまたは他の基準に基づいて閉ループアイドルを解除します。
TPSの読み値が「エンジン状態設定」の「スロットル閉TPSスレッショルド:アイドル判定スロットル開度」で設定した値を下回ると、MS3Proはこの量を現在のIACバルブ開度に加算して、RPMの急激な低下によるエンジンストールを防ぎます。
• Use last value or table - If “Use last value” is selected, the MS3Pro will start with the value it last used to obtain the target RPM when closed loop idle re-engages.
If set to “use table,” when the closed loop idle engages, it will select the initial idle opening from the Closed Loop Idle Initial Value table.
•最後の値またはテーブルを使用する - 「最後の値を使用する」が選択されている場合、MS3Proは、閉ループアイドル状態が再開したときに目標RPMを取得するために最後に使用された値で開始します。
「テーブルを使用」に設定すると、閉ループアイドルが作動すると、閉ループアイドル初期値テーブルから初期アイドル開度が選択されます。
• Use CLT or MAT in table lookup - This specifies if the initial value table uses coolant or manifold air temperature to determine the initial value.
•テーブルルックアップでCLTまたはMATを使用する - 初期値テーブルが冷却液またはマニホールドの空気温度を使用して初期値を決定するかどうかを指定します。
• Close delay - This setting controls how long in seconds the valve takes to go to the closed position after the throttle is pressed. A setting of 0 seconds means do not close the valve.
•Close Delay - この設定は、スロットルを押した後にバルブが閉位置に移動するまでの時間を秒単位で制御します。
0秒の設定は、バルブを閉じないことを意味します。
• Open valve on WOT - This setting causes the idle valve to open if the TPS value goes above the wide open throttle threshold value specified in engine states.
We’ve seen this produce measurable power gains on engines where the throttle body is slightly undersized and the motor needs all the air it can get.
•WOTの開弁 - この設定は、TPS値がエンジン状態で指定されたワイドオープンスロットルしきい値を上回ると、アイドルバルブを開きます。
スロットルボディがわずかに小型化されており、モーターが得ることができるすべての空気が必要なエンジンでは、この測定可能なパワーゲインが得られています。
スロットル全開時にISCも全開としてちょっぴり吸入空気量を稼ぐコトなど出来たりします・
• Leave Valve Closed Above (rpm) - On throttle lift, leave the idle valve closed above this RPM.
Note: This setting is only necessary if a close delay is set since otherwise, the valve does not close when the throttle is pressed.
•バルブを閉じたままにする(rpm) - スロットルリフトでは、アイドルバルブをこの回転数以上では閉じたままにします。
注意:この設定は、閉鎖遅延が設定されている場合にのみ必要です。スロットルを開けてもバルブが閉じることはありません。
• For this number of seconds - This setting re-opens the idle valve after the number of seconds set on throttle lift/shift. After this timer runs out, the valve will open to the previous learned value plus the dashpot adder.
This is used to allow the valve to closed while shifting gears, but to open the valve in cases where this may be necessary to prevent stalling.
Closed loop idle PID gains are used to tune the response of the valve.
We’ll go over the tuning process after covering the remaining settings.
•この秒数 - この設定は、スロットルリフト/シフトに設定された秒数の後にアイドルバルブを再び開きます。
このタイマーが切れた後、バルブはダッシュポット加算器を加えた前の学習値まで開きます。
これは、ギヤをシフトさせている間にISCを閉じることを可能にするが、ストールを防止するために必要である場合にはISCを開くために使用される。
閉ループアイドルPIDゲインは、ISCの応答を調整するために使用されます。
残りの設定をカバーした後、調整プロセスを進めます。
• Tuning Mode - In Basic, the P and I terms are set to 100, the D term is set to 0, and the slider is the only adjustment. In Advanced, you can adjust the gains separately, and then they can all be scaled with the slider.
•調整モード - 基本では、PとIの項は100に設定され、D項は0に設定され、スライダは唯一の調整です。 Advancedでは、ゲインを個別に調整することができ、スライダを使用してゲインをすべて調整することができます。
• Proportional Gain This setting controls the Proportional Gain of the PID algorithm. Setting this higher will result in a larger immediate response to changes in RPM.
Setting this too high can result in unwanted oscillation of RPM.
•比例ゲインこの設定は、PIDアルゴリズムの比例ゲインを制御します。これを高く設定すると、RPMの変更に対する即時応答が大きくなります。
これを高く設定すると、RPMが不必要に振動する可能性があります。
PID制御って何?
• Integral Gain This setting controls the Integral Gain of the PID algorithm.
This is the PID setting used to actually make the RPM meet the target RPM. Setting it too low will cause the RPM to never reach the target.
Setting this value too high will result in unwanted oscillation of RPM.
•積分ゲインこの設定は、PIDアルゴリズムの積分ゲインを制御します。
これは実際にRPMを目標RPMに合わせるために使用されるPID設定です。それを低く設定すると、RPMが決してターゲットに到達しなくなります。
この値を高く設定すると、RPMが不必要に振動します。
• Derivative Gain This setting controls the Derivative Gain of the PID algorithm. It can be used to help dampen the effects of the Proportional and Integral settings.
It is usually not necessary for good control of idle speed.
It is recommended that this is left at 0%.Closed Loop Idle PID Delays and Behavior - These settings cover more about how the engine reacts to a given amount of valve opening.
The code has two adjustments, a sensitivity slider that affects response with a single
adjustment, and individual PID gain adjustments for engines that need more detailed changes.
•微分ゲインこの設定は、PIDアルゴリズムの微分ゲインを制御します。これは、比例および積分の設定の影響を軽減するのに役立ちます。
通常、アイドリング速度を適切に制御するためには必要ありません。
これは0%のままにすることをお勧めします。クローズドループアイドルPID遅延と動作 - これらの設定は、エンジンが所定のバルブ開度にどのように反応するかについて詳しく説明しています。
コードには2つの調整があります。感度スライダは、
より詳細な変更が必要なエンジンの調整、および個々のPIDゲイン調整が含まれます。
• PID delay - This is how long in seconds all other conditions for entering PID control must be met for before the MS3Pro will engage PID control.
Set this as low as possible without being below what is normal RPMdot jitter with the engine RPM not changing.
Typical values will be between 50 and 75 RPM/sec.
•PID遅延 - これは、MS3ProがPID制御に関与する前に、PID制御に入る他のすべての条件が満たされている必要がある秒数です。
エンジンRPMが変化していない通常のRPMdotジッタ以下でなくても、これをできるだけ低く設定してください。
典型的な値は50~75RPM /秒である。
• Crank to run taper - How long after starting the MS3Pro will wait to engage PID control.
•テーパを実行するクランク - MS3Proの起動後、PID制御を開始するまでどれくらい待つか。
• PID ramp to target time - Once PID engages, the MS3Pro will gradually move the target value from the current RPM to the target speed.
This can be used to help larger P-values be used, making it easier to tune PID to catch sudden drops in idle speed.
•目標時間へのPIDランプ - PIDが関与すると、MS3Proは目標値を現在のRPMから目標速度に徐々に移動します。
これは、より大きなP値を使用するのを助けるために使用され、PIDを調整してアイドリング速度の急激な低下を捕らえることを容易にします。
• PID Control Interval - This controls how often the PID control code runs.
Setting this too high will make the code respond too slowly to sudden changes in load, possibly allowing the engine to stall. Setting it too low will make the engine unstable and likely to have surge issues.
•PID Control Interval - PID制御コードの実行頻度を制御します。
これを高く設定すると、突然の負荷変動に対してコードの応答が遅すぎるため、エンジンが停止する可能性があります。低すぎるとエンジンが不安定になり、サージ問題が発生する可能性があります。
7.4.7.1 Tuning closed loop idle Before trying to tune closed loop idle speed control, be sure to try tuning warmup only idle speed control. With warmup only control, a higher step-count or duty should yield higher RPM.
7.4.7.1閉ループ・アイドリングの調整閉ループ・アイドル・スピード・コントロールをチューニングする前に、アイドル・スピード・コントロールのみをウォームアップ・チューニングするようにしてください。ウォーミングアップのみの制御では、ステップカウントまたはデューティが高いほどRPMが高くなります。
Make sure that this is the case, and that smooth idle speed can be attained with warmup only before moving on to closed loop control.
これが正しいかどうかを確認し、閉ループ制御に移行する前にウォーミングアップでスムーズなアイドリング速度を達成できることを確認してください。
There are two main things to tune when tuning closed-loop idle speed control:
• PID gains
• Conditions for entering PID control
閉ループアイドリング速度制御をチューニングするときは、チューニングする主な2つのことがあります。
・PIDゲイン
・PID制御入力条件
We recommend tuning these in stages. For example, PID cannot be tuned if the code is never entering the PID loop.
Because of this, it is a good idea to start by tuning the conditions for entering PID control, then come back and tune the PID gains.
This includes both closed loop settings and engine state settings:
これらを段階的に調整することをお勧めします。たとえば、コードがPIDループに入力されない場合、PIDをチューニングすることはできません。
このため、PID制御に入る条件を調整してから、PIDゲインを調整して調整することをお勧めします。
これには、閉ループ設定とエンジン状態設定の両方が含まれます。
• VSS threshold - Using VSS in engine states will make it so that the PID loop activates after the vehicle speed drops below the VSS threshold.
This can prevent closed loop idle from activating while decelerating if using an automatic transmission that freewheels on deceleration or if coasting with your foot on the clutch.
•VSSのしきい値 - エンジンの状態でVSSを使用すると、車速がVSSのしきい値を下回った後にPIDループがアクティブになるようになります。
これにより、減速時にフリーホイールを使用する自動変速機を使用する場合、またはクラッチの足で惰性走行する場合に、閉ループアイドリングが作動しなくなるのを防ぐことができます。
• Throttle closed TPS threshold - Set as low as possible.
If the TPS has a bit of noise, set it to around 1%; otherwise set it to 0.3%-0.5%.
•スロットル閉TPSスレッシュホールド - 可能な限り低く設定します。
TPSに少しのノイズがある場合は、約1%に設定します。それ以外の場合は0.3%〜0.5%に設定します。
• PID delay - This should be set so that the RPM dropping on throttle lift can come to a rest slightly higher than the target RPM, and become stable there.
Between three and five seconds normally works the best.
•PID遅延 - これは、スロットルリフトで低下したRPMが目標RPMよりわずかに高くなり、そこで安定するように設定する必要があります。
3秒から5秒の間に正常に動作します。
• Crank to Run Taper - This setting controls how long after starting the code will delay before entering PID.
Between three and five seconds works well for this setting.
•Crank to Run Taper - この設定は、コードを開始してからPIDに入るまでの時間を制御します。
この設定では、3秒から5秒の間でうまくいきます。
• Slow deceleration threshold - This are the first of the PID lockout detection settings. Use this setting so that
the code can tell the difference between decelerating with closed throttle (engine braking) and sitting at one RPM. This should be lower than the rate of deceleration in top gear.
•低速減速スレッショルド - これはPIDロックアウト検出設定の最初のものです。この設定を使用すると、
このコードは、閉じたスロットル(エンジンブレーキ)と1 RPMでの減速の違いを示すことができます。これはトップギヤの減速率よりも低くなければなりません。
• Overrun MAP threshold - This is the second PID lockout detection setting. The code assumes that if MAP is lower than this setting, the driver must be decelerating, and not "locked out" of the PID loop. Set this to a value lower than the MAP reading at idle.
•オーバーランMAPしきい値 - これは2番目のPIDロックアウト検出設定です。このコードでは、MAPがこの設定よりも低い場合、ドライバは減速していて、PIDループの「ロックアウト」されていないと仮定しています。アイドル時のMAP読み取り値よりも低い値に設定してください。
• Slow acceleration threshold - A good value for this setting will typically be in the 200-400 RPM/sec range.
If the engine speed suddenly accelerates with no throttle input (like if the clutch is engaged while the car is rolling and in gear), it must accelerate at a rate greater than this setting before the PID code will be disengaged.
Setting this value too high can lead to stalls after engaging the clutch in this manner.
To tell whether the code is entering PID idle control, use the "CL Idle" indicator in TunerStudio.
If the current gauge cluster in TunerStudio does not include this indicator, temporarily switch to a cluster that does.
Most modern OEM cars enter idle speed regulation in a very similar manner.
The MS3 idle speed control algorithm was emulates this behavior.
The sequence of events that the code was designed to follow are listed below:
•低速の加速しきい値 - この設定に適した値は、通常200〜400 RPM /秒の範囲です。
エンジン速度がスロットル入力なしで突然加速した場合(たとえば、車両が回転中および歯車中にクラッチが接続されている場合など)、PIDコードが切断される前に、この設定よりも速い速度で加速する必要があります。
この値を高すぎる値に設定すると、クラッチをこのように噛み合わせた後にストールする可能性があります。
コードがPIDアイドル制御に入っているかどうかを知るには、TunerStudioの "CL Idle"インジケータを使用します。
TunerStudioの現在のゲージクラスタにこのインジケータが含まれていない場合は、一時的にクラスタに切り替えます。
最新のOEM車のほとんどは、非常に似たような方法でアイドリング速度規制に入ります。
MS3のアイドル速度制御アルゴリズムは、この動作をエミュレートしていました。
コードに従うように設計された一連のイベントを以下に示します。
1. Throttle Lift - On throttle lift, the code opens the valve to the value learned in the last iteration of the PID loop (or the initial value table) + the dashpot adder.
The logic here is that the last learned value should result in an RPM close to the target RPM.
The dashpot adder is added so that when RPM settles, it settles to an RPM slightly higher than the target.
This is in case the air conditioning was turned on or IAT increased or anything else that might make RPM lower than the last time the PID code ran.
1.スロットル・リフト - スロットル・リフト時、コードはバルブをPIDループ(または初期値テーブル)+ダッシュポット加算器の最後の反復で学習された値に開きます。
ここでのロジックは、最後に学習された値が目標RPMに近いRPMになるはずであるということです。
ダッシュポット加算器が追加されているため、RPMが落ち着くと、ターゲットよりわずかに高いRPMに落ち着きます。
これは、空調がオンになっている場合や、IATが増加した場合や、PIDコードが最後に実行された時よりもRPMが低くなる可能性がある場合です。
2. RPM settles - After throttle lift, eventually the clutch is pushed in and RPM drops to wherever it will settle given the learned value + the dashpot adder.
Hopefully, the idle has settled to an RPM that is less than the commanded target + the Idle Activation RPM adder.
If so, then the code will wait for the amount of time specified by the PID delay, and then enter PID control.
If RPM settles above the commanded target + Idle Activation RPM adder, the code then starts checking the PID lockout detection conditions. Assuming those conditions are met, the code will still enter the PID loop after the amount of time specified by the PID delay.
2. RPMが安定します - スロットルリフト後、最終的にクラッチが押し込まれ、学習値+ダッシュポット加算を考慮してRPMが落ち着きます。
うまくいけば、アイドルは、コマンドされた目標+アイドルアクティベーションRPM加算器よりも小さいRPMに落ち着いています。
そうであれば、コードはPID遅延で指定された時間だけ待機し、PID制御に入ります。
RPMがコマンドされた目標+アイドルアクティベーションRPM加算器の上に落ち着くと、コードはPIDロックアウト検出条件のチェックを開始します。これらの条件が満たされていると仮定すると、コードはPID遅延で指定された時間が経過した後でもPIDループに入ります。
3. PID control activates, RPM starts dropping to target - After the PID delay expires, the PID code will be activated. RPM will slowly drop to the target over the number of seconds specified by the PID ramp to target time.
3. PID制御がアクティブになり、RPMがターゲットにドロップを開始します。 - PID遅延が終了すると、PIDコードがアクティブになります。 RPMは、PIDランプから目標時間に指定された秒数をかけて、ターゲットにゆっくりと落ちます。
4. Normal idle speed reached - RPM reaches the commanded target. PID continues regulating RPM until the throttle is pressed.
Once the code is reliably entering PID on every throttle lift, it is time to actually tune the PID code to reach and hold the RPM target.
The settings that are associated with or affect the operation of the PID algorithm are listed below:
4.通常のアイドリング速度に達しました。 - RPMが指令された目標に到達しました。スロットルが押されるまで、PIDはRPMを調整し続けます。
コードがすべてのスロットルリフトで確実にPIDに入ったら、PIDコードを実際に調整してRPMターゲットに到達して保持する時間です。
PIDアルゴリズムの動作に関連するか、またはPIDアルゴリズムの動作に影響する設定を以下に示します。
• Idle Open Duty/steps and Idle Valve closed duty/steps - These should be set to the minimum and maximum values that should be used during PID loop and driving operation.
In addition, having these set further apart results in the PID loop being more sensitive (making changes to the output given much smaller changes in input).
•アイドルオープンデューティ/ステップおよびアイドルバルブ閉デューティ/ステップ - PIDループおよび運転操作中に使用される最小値および最大値に設定する必要があります。
さらに、これらの値をさらに離して設定すると、PIDループがより敏感になります(入力を大幅に小さくすると出力が変化します)。
• Min duty/steps for PID - This is the lowest duty/number of steps that the PID loop is allowed to command.
Set this low enough to result in an RPM slightly lower than the lowest target RPM.
•PIDの最小デューティ/ステップ - これは、PIDループが指令できる最低のデューティ/ステップ数です。
これを低く設定すると、RPMが最低の目標RPMよりわずかに低くなります。
• RPM with valve open/closed - These should be set to the RPM with the valve closed and the RPM with the valve opened respectively.
If using these settings makes the code unresponsive to changes in idle speed, the upper RPM value can be set lower.
•バルブの開閉を伴うRPM - これらは、バルブが閉じているRPMと、バルブが開いているRPMに設定する必要があります。
これらの設定を使用すると、アイドル速度の変化に対してコードが応答しなくなるため、RPMの上限値を低く設定できます。
• PID Control Interval - This controls how often the PID code runs. Setting this too high can result in sluggish response to sudden changes in load, such as the Air Conditioning being turned on.
Setting it too low can result in the loop being overly sensitive to RPM changes.
Typically 100ms works well.
•PID Control Interval - PIDコードの実行頻度を制御します。これを高く設定すると、空調がオンになっているなど、突然の負荷変動に応答が遅くなることがあります。
値を小さすぎると、ループがRPMの変更に過度に敏感になる可能性があります。
通常100msはうまくいきます。
• PID controller gains - These control the actual response of the code to changes in RPM, as well as how well the code will reach the target. Tips for tuning these are listed below.
In Basic mode, simply adjust the slider, starting with a low value and increasing it until the engine can react fast enough to any load placed on it to avoid stalling or an unacceptable RPM dip.
The following basic steps should be used for tuning the PID controller gains in advanced mode:
•PIDコントローラゲイン - RPMの変化に対するコードの実際の応答と、コードがターゲットにどれだけうまく到達するかを制御します。これらのチューニングのヒントを以下に示します。
基本モードでは、低い値から始まり、エンジンが失速や許容できないRPMのディップを避けるためにエンジンに十分な速さで反応するまでスライダーを調整します。
アドバンストモードでPIDコントローラのゲインを調整するには、以下の基本ステップを使用する必要があります。
1. Zero all the gains - Set all the gains to 0%.
This is so that the effects of tuning the I-term in the next step are not confused with the effects of any other setting.
1.すべてのゲインをゼロにする - すべてのゲインを0%に設定します。
これは、次のステップでI項を調整する効果が他の設定の効果と混同されないようにするためです。
2. Tune the Integral (I) gain - The Integral gain is the only term that controls whether the code actually reaches its target. Higher values for Integral gain will result in the code being able to get closer to the commanded target; however, a value that is too high will result in oscillation.
The easiest way to determine a good value for the I term is to keep increasing it until oscillation occurs, then slightly lower it.
If this value is increased to 200% without reaching a point where oscillation occurs, then the RPM with valve opened setting can be decreased as far as necessary, and the open duty/steps setting and closed duty/steps setting can be made further apart to make the PID loop more sensitive.
2.積分(I)ゲインを調整する - 積分ゲインは、コードが実際にその目標に到達するかどうかを制御する唯一の項です。積分ゲインの値が高いほど、コードは指令されたターゲットに近づくことができます。しかし、値が高すぎると発振につながります。
I項の良い値を決める最も簡単な方法は、発振が起きるまでそれを増やしてから少し下げることです。
この値を発振が発生しない範囲で200%まで増加させると、必要に応じて弁開度を設定したRPMを下げることができ、オープンデューティ/ステップ設定と閉デューティ/ステップ設定をさらに離すことができますPIDループをより敏感にする。
3. Tune the Proportional (P) gain - After tuning the I gain so that the RPM reaches the commanded target without oscillation, the P gain can be tuned.
The best way to tune this is to set it as high as possible without getting any oscillation.
After setting this, try turning on the air conditioning or other accessories that normally lower RPM or increase load. When these accessories are turned on, the RPM should dip a bit, then recover (the valve position should increase significantly).
Using longer PID ramp to target times can also make it so that when the PID algorithm engages, a higher P gain can be set without causing oscillation.
3.比例(P)ゲインを調整する - Iゲインを調整してRPMが発振することなく指令された目標に達すると、Pゲインを調整することができます。
これを調整する最善の方法は、振動を起こさずにできるだけ高く設定することです。
これを設定したら、通常はRPMを下げたり、負荷を増やしたりする空調やその他のアクセサリをオンにしてみてください。これらのアクセサリがオンになっていると、RPMが少し落ち込んでから復帰します(バルブ位置が大幅に増加するはずです)。
より長いPIDランプを目標時間に使用することによって、PIDアルゴリズムが関与するときに、より高いPゲインを発振させることなく設定できるようにすることもできます。
4. Tune the Derivative (D) gain - For most users, use of the D gain should not be necessary. It substantially dampens the response of the loop.
4.微分(D)ゲインを調整する - ほとんどのユーザーにとって、Dゲインの使用は必要ありません。これは、ループの応答を実質的に減衰させます。
Some final tips:
最終的なヒント
• Idle Fuel Tuning - Before even attempting to tune Closed-loop Idle speed control, tune the area around idle so that if RPM goes up or down or load goes up or down, the AFR stays close to the same value.
Changing AFR can affect idle speed, which can then cause the PID code to try to correct, getting into an unrecoverable oscillation.
•アイドル燃料調整 - 閉ループアイドル速度制御を調整しようとする前に、RPMがアップまたはダウンしたり、ロードがアップまたはダウンしたりすると、AFRは同じ値に近くなります。
AFRを変更すると、アイドル速度に影響し、PIDコードが修正しようとし、回復不能な振動に陥る可能性があります。
• Idle Advance - The idle advance feature can be used to help "catch" the idle in situations where heavy load is suddenly added while the engine is idling.
It is recommended that the advance is increased with increasing load, and decreased with decreasing load.
This way, when the air conditioning or electric fan are turned on, the sudden increase in load causes a corresponding increase in timing which generates more power.
Also, this feature can be used so that on idle without load, slightly less than what would normally be considered "optimal" timing can be used.
This causes the idle valve to need to open further to keep a particular idle speed.
Then when sudden load is added, the timing increases and the valve position does not have to change as much to cope with the sudden load increase.
•アイドルアドバンス - アイドリングアドバンス機能は、エンジンがアイドリングしている間に重い負荷が突然加えられる状況でアイドリングを「捕まえる」のに役立ちます。
進歩は負荷が増加するにつれて増加し、負荷が減少すると減少することが推奨される。
このようにして、空調または電動ファンがオンにされると、突然の負荷の増加は対応する時間の増加を引き起こし、より多くの電力を生成する。
また、この機能を使用すると、負荷のないアイドリング状態で、通常は「最適」タイミングと見なされるものよりわずかに少ないタイミングを使用することができます。
これにより、特定のアイドル速度を維持するために、アイドルバルブをさらに開く必要があります。
そして、急激な負荷が加わると、タイミングが早くなり、突然の負荷増加に対応するためにバルブの位置をそれほど変更する必要はありません。
7.4.8 Closed loop idle target curve
This screen is used when running closed loop idle.
It lets you specify the target RPM as a function of coolant temperature.
7.4.8閉ループアイドル目標曲線
この画面は、閉ループアイドリングを実行するときに使用されます。
クーラント温度の関数として目標RPMを指定することができます。
7.4.9 Closed loop idle initial values
If you are using closed loop idle with the initial value table selected, the MS3Pro uses this to look up the initial duty cycle when closed loop idle control engages.
The X-axis specifies what target RPM, and the Y-axis is either coolant or air temperature, as determined by the closed loop settings screen.
7.4.9閉ループアイドル初期値
初期値テーブルを選択してクローズドループアイドルを使用している場合、MS3Proは閉ループアイドル制御が開始されたときにこれを使用して初期デューティサイクルをルックアップします。
X軸は、閉ループ設定画面で決定される目標RPM、Y軸が冷却材または空気温度のいずれであるかを指定します。
7.4.10 PWM Idle voltage compensation
This screen is available when using PWM warmup or closed loop idle.
PWM valves, particularly the two wire sort, change how far they open when the battery voltage changes.
This number is added to (or subtracted from, in the case of negative numbers) the duty cycle at the specified battery voltage.
Three wire PWM valves are less likely to need this, and often need this table to be zeroed out.
7.4.10 PWMアイドル電圧補償
この画面は、PWMウォームアップまたは閉ループアイドルを使用する場合に使用できます。
PWMバルブ、特に2線式ソレーションは、バッテリ電圧が変化したときにどれくらい開くかを変えます。
この数値は、指定されたバッテリ電圧でのデューティ・サイクルに加算されます(または負数の場合は減算されます)。
3ワイヤPWMバルブはこれを必要とする可能性が低く、このテーブルをゼロにする必要があることがよくあります。
7.4.11 Air conditioning idle up
7.4.11空調アイドルアップ
The MS3Pro can control the air conditioning and increase the idle speed when the air conditioning is active.
MS3Proは空調を制御し、空調がアクティブなときにアイドル速度を上げることができます。
• A/C idleup on - Allows the MS3Pro to control the A/C or increase idle speed when the A/C is on.
•A / Cアイドル・アップをオン - A / CがオンのときにMS3ProがA / Cを制御したり、アイドル速度を上げたりすることを許可します。
• Idle-up output - This uses an output pin to activate the A/C compressor and/or condenser fan.
•アイドルアップ出力 - これは、出力ピンを使用してA / Cコンプレッサーおよび/またはコンデンサファンをアクティブにします。
• Idle-up input - This is the input used to tell the MS3Pro that the air conditioning is on or needs to be turned on.
•アイドルアップ入力 - これは、空調がオンであるか、オンにする必要があるかをMS3Proに伝えるために使用される入力です。
• Input Polarity
– Normal: The A/C switch grounds the ECU input to trigger the A/C.
– Inverted: The A/C switch sends 12 volts to the ECU to trigger the A/C.
•入力極性
- ノーマル:A / CスイッチがECU入力を接地し、A / Cをトリガします。
- 反転:A / Cスイッチは12ボルトをECUに送信し、A / Cをトリガします。
• Idle-up Delay - The amount of time between receiving a signal on the idleup input and increasing the idle valve opening.
•アイドルアップ遅延 - アイドルアップ入力の信号を受信してからアイドルバルブの開度を大きくするまでの時間。
• Idle-up min RPM - The lowest RPM where the A/C can run. If the RPM falls below this point, the A/C output is turned off.
•アイドルアップ分RPM - A / Cが実行できる最低RPM。 RPMがこの点を下回ると、A / C出力はオフになります。
• Compressor delay since last on - The minimum amount of time between turning the idleup output off and turning it back on. Use this to prevent excessively rapid cycling of the compressor.
•最後にオンしてからのコンプレッサー遅延 - アイドルアップ出力をオフにして再びオンにするまでの最小時間。コンプレッサーの過度の急激なサイクルを防ぐためにこれを使用してください。
• Idle-up duty / idle-up steps - The amount to increase the idle valve opening when the A/C is on.
•アイドルアップデューティ/アイドルアップステップ - A / Cがオンのときのアイドルバルブ開度を増加させる量。
• Idleup target RPM adder - You can either set this to zero to make the MS3Pro hold a constant RPM when the A/C engages, or use this to increase the RPM to better drive the compressor.
This feature requires closed loop idle to be on.
•アイドル目標RPM加算器 - A / Cが動作しているときにMS3Proを一定のRPMに保つためにこれをゼロに設定するか、コンプレッサをより良く駆動するためにRPMを増やすためにこれを使用します。
この機能では、閉ループアイドルがオンになっている必要があります。
• Idleup CL load allowance - The engine may be under more load when decelerating with the A/C on.
This number is added to the PID lockout max decel load when the idleup input is on.
•アイドルアップCL負荷許容量 - A / Cをオンにして減速すると、エンジンの負荷が大きくなる可能性があります。
この番号は、アイドルアップ入力がオンのときのPIDロックアウトの最大減速負荷に加算されます。
• TPS shutoff enable - While most OEM ECUs shut the air conditioning off at full throttle to free up horsepower,the MS3Pro allows you to decide if you want to leave the A/C on full time, which can be useful for hot track days.
Setting this to on will let the MS3Pro shut the A/C off above a set TPS value.
•TPSシャットオフを有効にする - ほとんどのOEM ECUがフルスロットルで空調をオフにして馬力を解放する間に、MS3ProはA / Cをフルタイムで放置するかどうかを決めることができます。
これをオンに設定すると、MS3Proは設定されたTPS値を超えてA / Cをオフにします。
• TPS shutoff % - If using TPS shutoff, MS3Pro turns off the A/C output above this TPS opening value.
•TPSシャットオフ% - TPSシャットオフを使用する場合、MS3Proは、このTPSオープン値を超えるA / C出力をオフにします。
• TPS hysteresis - Once the TPS based A/C shutoff has engaged, the TPS needs to fall this amount below
•TPSヒステリシス - TPSベースのA / Cシャットオフが開始されると、TPSはこの値を下回る必要があります
the TPS shutoff value to turn the A/C back on.
A / Cをオンに戻すためのTPSシャットオフ値。
• VSS shutoff enable - Turning this on allows shutting off the A/C above a set speed.
•VSSシャットオフイネーブル - これをオンにすると、A / Cを設定された速度より上にシャットオフできます。
• VSS shutoff speed - If VSS shutoff is enabled, the A/C will turn off above this speed.
•VSS遮断速度 - VSS遮断が有効になっている場合、A / Cはこの速度より上でオフになります。
• VSS hysteresis - Once the VSS based A/C shutoff has engaged, the speed needs to fall this amount below the VSS shutoff value to turn the A/C back on.
•VSSヒステリシス - VSSベースのA / Cシャットオフが作動すると、A / Cをオンに戻すには、この量をVSSシャットオフ値より下げる必要があります。
• RPM shutoff enable - allows shutting off the A/C above a maximum RPM to prevent damage to the compressor.
•RPMシャットオフイネーブル - コンプレッサの損傷を防ぐために最大RPMを超えるA / Cをシャットオフできます。
• Maximum RPM - If RPM shutoff is enabled, the A/C will turn off above this RPM.
•最大RPM - RPMシャットオフが有効になっている場合、A / CはこのRPMより上でオフになります。








