
ソレノイドとモーターを同時に動かそうとすると、
動いたり動かなかったりする問題の対策と、電気系の製作の続きです。
一昨日の日曜にやった作業なのですが、ブログに書くのが少し遅くなりました。
さて、まずは以前の
ブログで書いた対策案の
(1) ソレノイドとモーターの
始動タイミングをずらす
(2) モーター始動電流を
アシストするコンデンサを追加する
(3) 小サイズの同じ
スイッチング電源を追加する
についてです。
最初に(1)を試してみましたが、まったく効果がありませんでした。
DCモーターは始動電流が盛大に流れるのに対して、DCソレノイドには
通常時以上の始動電流が流れるようなことはないためでした。したがって、先にソレノイドを動かして後からモーターを動かすという
時間差をつけてもまったく無意味でした。純粋にソレノイドに流れる電流分が上乗せされることが、モーターの始動電流を足りなくさせるようです。ということで、その回路の追加自体を取りやめです。
ここで、モーター単体での始動電流がどれほどかかっているのか、実測してみることにしました。
持っているオシロ付きマルチメータは、電流を測るときには10Aまで測れるモードと、400mAまでしか測れないモードの2種類に分かれていて、プローブを接続する場所も違っています。400mAは確実に超えると思われるため、10Aの方を使うことになるわけですが、オシロモードにしたときに縦軸レンジを1divが3Vよりも小さくできないようです。
それで確認してみた結果がこちら。

うーん、縦軸のレンジが悪くてわかりにくいですね。モーターを動かし始めるときの始動電流は、これで見る限り1.2A程度のようです。50ms後には、0.3Aくらい(正確にはちょっと読み取れない)まで下がっているようですね。このオシロでは見えないだけで、最初の最初は瞬間は、実は1.2Aよりも高いかもしれません。
ソレノイドは0.3A消費するので、合わせると1.5Aとなります。ごく瞬間的には1.5Aよりも高いかもしれません。使っているスイッチング電源の規格は最大2.1A出力なのですが、半分くらいしか出ないものも世の中には普通にあるようなので、やはりその瞬間に足りなくなって落ちてしまうのでしょう。
また、始動電流は必要なのは、50ms未満程度となりますので、追加コンデンサでのアシスト作戦は機能しそうな気がします。
ということで、次に(2)です。
‥‥と思ったのですが、小容量の電源モジュールで、比較的巨大なコンデンサを追加するには、最大電流を抑える
ちょっとした回路を入れないと充電させることが難しそうなのです。それに加えて、大容量コンデンサは意外に
サイズが大きい(意外じゃないか!?)ので、箱への納め方にも工夫が必要です。なので、やっぱりそれもやめることにしました。
結局残ったのは、(3)のみということですね。
頑張って箱に電源2個を
突っ込むことにします。
ということで、追加のスイッチング電源を入れる前提で、ざっとサイズ感を維持したまま絵にしてみるとこういう感じで箱に詰めることになります。

箱の蓋の裏、箱の底、箱の中間に板を入れた
三層に部品を配置して配線で繋ぎます。上の絵では、右下が箱の底、右上が箱の蓋を開けてひっくり返した状態、左が中間層です。
中間層は、基本動作に関わらないリモコン系だけにしようと思っていたのですが、
追加の電源を納める場所がないので、中間層に入れることにします。コネクタを外せば中間層を取り外せるようなオプショナルな構造にしようと思っていたのですが、基本動作上必須の部品を中間層に載せることとなるため、その構想は企画倒れですね。
箱のフットプリントを維持したいがために、無理やりこれで製作を突き進んでいますが、メンテナンスも含めて冷静に考えると、この手の自作物としては
詰め込みすぎだと思います。そもそも配線も多すぎます。
始める前からきれいには納められないだろうな‥‥と、
ややどんよりした気持ちになりつつも、ちゃんと動けばうれしいので部品配置と配線を始めました。というか、そもそもきれいとかいう前に、各所部品や配線が干渉せずに入るのかも
やってみないと確証はないので、とにかく頑張って詰め込んでみます。
まず、端子台が付いている部品(例えばDPDTリレー)は、

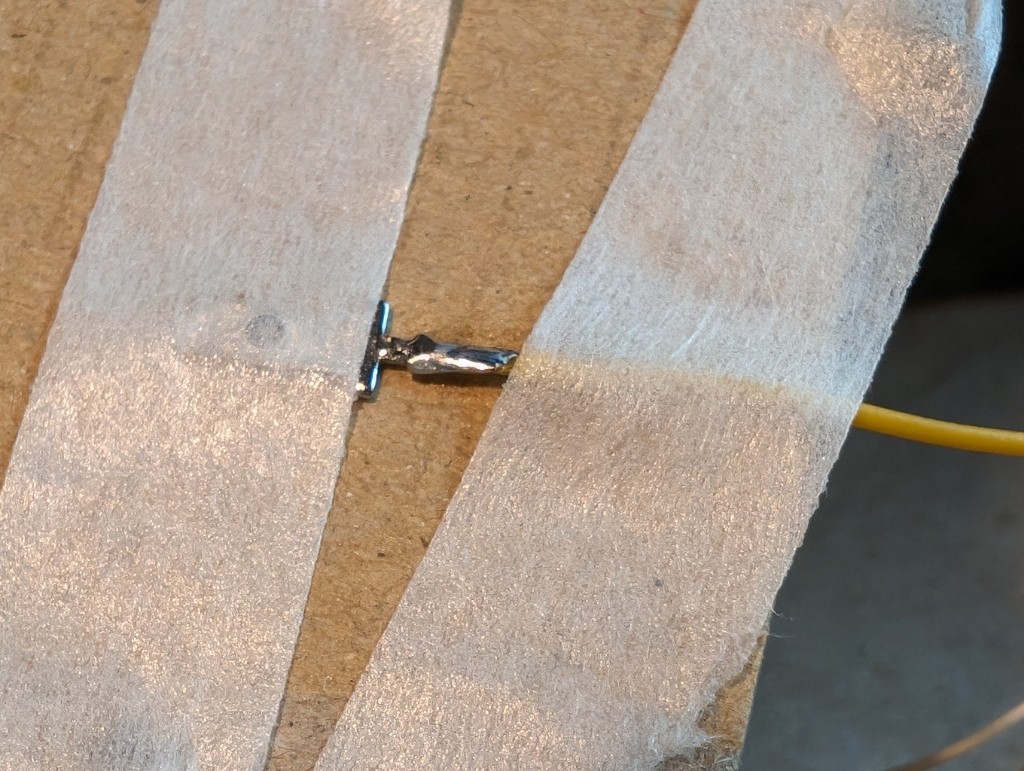
極力そのままの形で使いたいので、小さい端子台に差し込むのに良さげな平型端子を各配線の先に取り付けることにしました。安定した接触を維持するためです。
少し探したのですが、ちょうど良い平型端子が見つけられず、おそらく違う目的の使えそうな端子を入手しました。
でもそれが、
微妙に横幅が大きくて端子台に入らないのですよね‥‥。こんな感じです。

うーん‥‥、‥‥、入らないので削りました。

これで入るようになりました。
左が削った後、右が削る前です。並べてみると、僅かに幅が狭くなっているのがわかるかと思います。

これを、配線の先に合わせてテープで仮固定して、

はんだ付けします。
他のケーブルもこんな感じではんだ付けしました。

リモコン系にもある平型端子の取り付けは終わってはいませんが、基本動作に関わる部分のはんだ付けは終わったので、いよいよ詰め込んでいきます。
箱の蓋の裏に、まずは、蓋に開けた穴にデジタル遅延タイマーとスイッチを固定します。

さらに、スイッチング電源を固定して配線していきます。スイッチ周りの電源系で使う
太い線がなかなかいうことをきいてくれないので、捌くのが難しい。
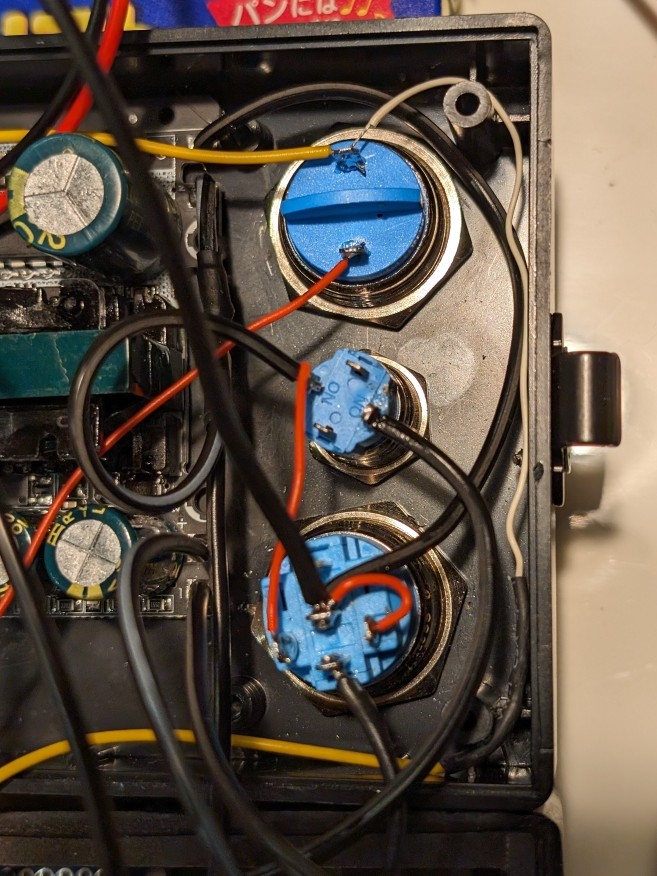
配線の取り回しと最適長の設計はしていないので、線を適当に取り回しながら適当に切って適当に入れていきます。‥‥うーん、
配線にセンスを感じませんね。
さらに、遅延タイマーリレーを手前の隙間に詰め込むのですが、
横幅がぎりぎりです。

これでは、端子台に突っ込む平型端子を折り曲げないと入りません。せっかく端子台があるのに、この基板を蓋に固定してしまうと隙間がなくて取り外せなくなりそうです。まあ仕方ないか。
箱の底側には、ユニバーサル基板で作った信号変換兼電源分配基盤を箱の底の奥側に固定し、手前にモータ駆動のDPDTリレーを配置して、配線を繋げていきます。箱の外に配線を取り出す
穴が底にあるので、横幅にもそんなに余裕はありません。

(1)の ソレノイドとモーターの始動タイミングをずらす実験のために、デジタル遅延タイマー出力と信号変換兼電源分配基盤とを繋ぐ線を切ってしまっていたので、はんだ付けして繋ぎ直しました。
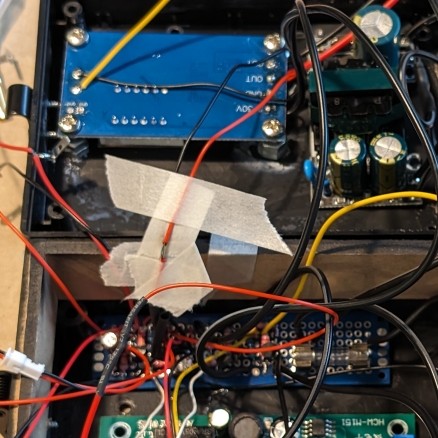
基本動作部の接続もまだ全部はできていませんが、雰囲気はだいぶできてきました。

‥‥と、一昨日の製作は時間切れでこんなところで終わりです。追加のスイッチング電源を含む中間層まではたどり着けませんでした。作業の続きはまた時間のある時ですね。
《つづく》
Posted at 2024/04/23 20:15:13 | |
トラックバック(0) | 日記
 ソレノイドとモーターを同時に動かそうとすると、動いたり動かなかったりする問題の対策と、電気系の製作の続きです。
ソレノイドとモーターを同時に動かそうとすると、動いたり動かなかったりする問題の対策と、電気系の製作の続きです。














 355のオイルが滲むように漏れていた問題は、
355のオイルが滲むように漏れていた問題は、








 355のオイルホースからのオイル漏れ修理が終わったとのことで、今日、取りに行ってきました。
355のオイルホースからのオイル漏れ修理が終わったとのことで、今日、取りに行ってきました。












 先日のブログで、「自動車保有関係のワンストップサービス」なるシステムを使ってみた話を書きました。その後の進捗と所見もちょっとあるのですが、まだ、車検証の住所変更(変更申請)は完結していません。なのでその話は完結後にすることにして、今日は、その発端となった自動車保険の方の話について書こうと思います。
先日のブログで、「自動車保有関係のワンストップサービス」なるシステムを使ってみた話を書きました。その後の進捗と所見もちょっとあるのですが、まだ、車検証の住所変更(変更申請)は完結していません。なのでその話は完結後にすることにして、今日は、その発端となった自動車保険の方の話について書こうと思います。

 みんカラをやられている方には、DIYをする方も多いことと思います。私もちょこちょこやりますが、みなさん、どういう心持ちでDIYされていますでしょうか?
みんカラをやられている方には、DIYをする方も多いことと思います。私もちょこちょこやりますが、みなさん、どういう心持ちでDIYされていますでしょうか?







